正在加载图片...
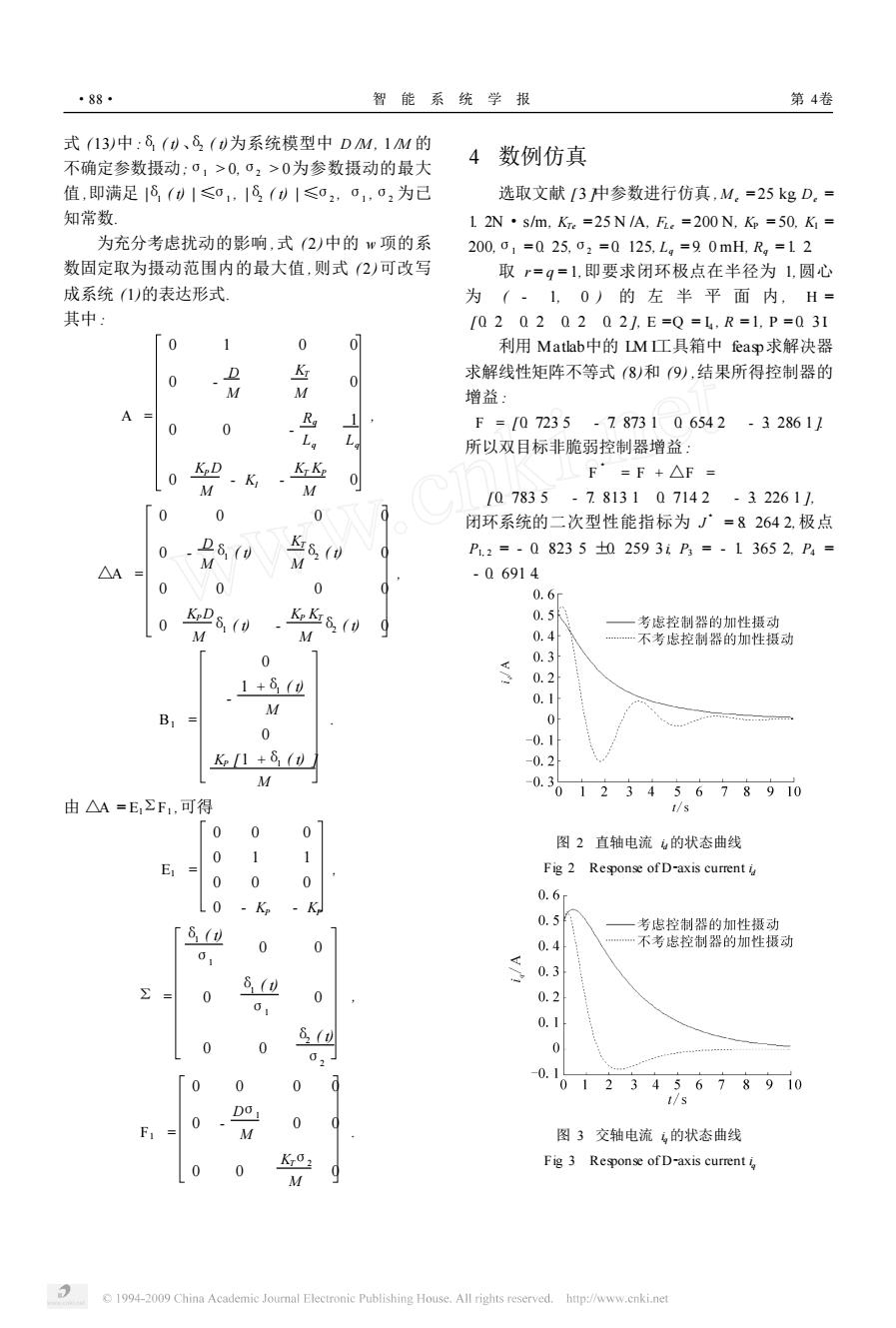
·88 智能系统学报 第4卷 式(13)中:8,()、8()为系统模型中DM,1M的 不确定参数摄动;0,>0,·2>0为参数摄动的最大 4数例仿真 值,即满足1⑧()1≤01,16()|≤02,01,02为已 选取文献[3中参数进行仿真,M.=25kgD.= 知常数 12N·s/m,K=25NA,E.=200N,K=50,K= 为充分考虑扰动的影响,式(2)中的w项的系 200,01=025,02=0125,Lg=90mH,R,=12 数固定取为摄动范围内的最大值,则式2可改写 取r=q=1,即要求闭环极点在半径为1,圆心 成系统1)的表达形式, 为(-1,0)的左半平面内,H= 其中: [02020202/,E=Q=l,R=1,P=031 0 1 0 0 利用Matlab中的M工具箱中feap求解决器 0 D K 0 求解线性矩阵不等式(8)和9),结果所得控制器的 M 增益: A R 0 0 F=[07235-7873106542-328611 Lg L 所以双目标非脆弱控制器增益: KpD KiK2 0 K 0 F·=F+△F= M M 07835-7813107142-322611, 0 0 0 闭环系统的二次型性能指标为J°=82642,极点 0 D8() K82(0 0 P.2=-0823502593iP=-13652.P4= M M △A -06914 0 0 0 0.6 0 KD6,() KK8,(0 0 0.5 一考虑控制器的加性摄动 M M 0.4 …不考虑控制器的加性摄动 0 0.3 1+8(少 0.2 0.1 M B1= 0 0 -0.1 K1+8,() -0.2 M -0.3 01 2345678910 由△A=E,∑F1,可得 1/s 0 0 图2直轴电流的状态曲线 0 1 E1= Fig 2 Response of D-axis currenti 0 0 0 -Kp 0.6 K 0.5f 考虑控制器的加性摄动 「8(d 0 0.4 …不考虑控制器的加性摄动 0 0 0.3 8(边 0 0 0.2 0 0.1 0 8(边 0, 0 -0.1 0 012345678910 t/s DO 0 0 图3交轴电流马的状态曲线 K02 0 0 Fig 3 Response of D-axis currenti, 1994-2009 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.net式 (13)中 :δ1 ( t)、δ2 ( t)为系统模型中 D /M , 1 /M 的 不确定参数摄动;σ1 > 0,σ2 > 0为参数摄动的最大 值 ,即满足 |δ1 ( t) | ≤σ1 , |δ2 ( t) | ≤σ2 , σ1 ,σ2 为已 知常数. 为充分考虑扰动的影响 ,式 ( 2)中的 w 项的系 数固定取为摄动范围内的最大值 ,则式 ( 2)可改写 成系统 (1)的表达形式. 其中 : A = 0 1 0 0 0 - D M KT M 0 0 0 - Rq Lq 1 Lq 0 KPD M - KI - KT KP M 0 , △A = 0 0 0 0 0 - D M δ1 ( t) KT M δ2 ( t) 0 0 0 0 0 0 KPD M δ1 ( t) - KP KT M δ2 ( t) 0 , B1 = 0 - 1 +δ1 ( t) M 0 KP [1 +δ1 ( t) ] M . 由 △A = E1ΣF1 ,可得 E1 = 0 0 0 0 1 1 0 0 0 0 - KP - KP , Σ = δ1 ( t) σ1 0 0 0 δ1 ( t) σ1 0 0 0 δ2 ( t) σ2 , F1 = 0 0 0 0 0 - Dσ1 M 0 0 0 0 KTσ2 M 0 . 4 数例仿真 选取文献 [3 ]中参数进行仿真 , M e = 25 kg, De = 1. 2N·s/m, KTe = 25 N /A, FL e = 200 N, KP = 50, KI = 200,σ1 = 0. 25,σ2 = 0. 125, Lq = 9. 0 mH, Rq = 1. 2. 取 r = q = 1,即要求闭环极点在半径为 1,圆心 为 ( - 1, 0 ) 的 左 半 平 面 内 , H = [ 0. 2 0. 2 0. 2 0. 2 ], E =Q = I4 , R = 1, P = 0. 3 I. 利用 Matlab中的 LM I工具箱中 feasp求解决器 求解线性矩阵不等式 (8)和 (9) ,结果所得控制器的 增益 : F = [0. 723 5 - 7. 873 1 0. 654 2 - 3. 286 1 ]. 所以双目标非脆弱控制器增益 : F 3 = F + △F = [0. 783 5 - 7. 813 1 0. 714 2 - 3. 226 1 ], 闭环系统的二次型性能指标为 J 3 = 8. 264 2,极点 P1, 2 = - 0. 823 5 ±0. 259 3 i, P3 = - 1. 365 2, P4 = - 0. 691 4. 图 2 直轴电流 id 的状态曲线 Fig. 2 Response of D2axis current id 图 3 交轴电流 iq的状态曲线 Fig. 3 Response of D2axis current iq ·88· 智 能 系 统 学 报 第 4卷