正在加载图片...
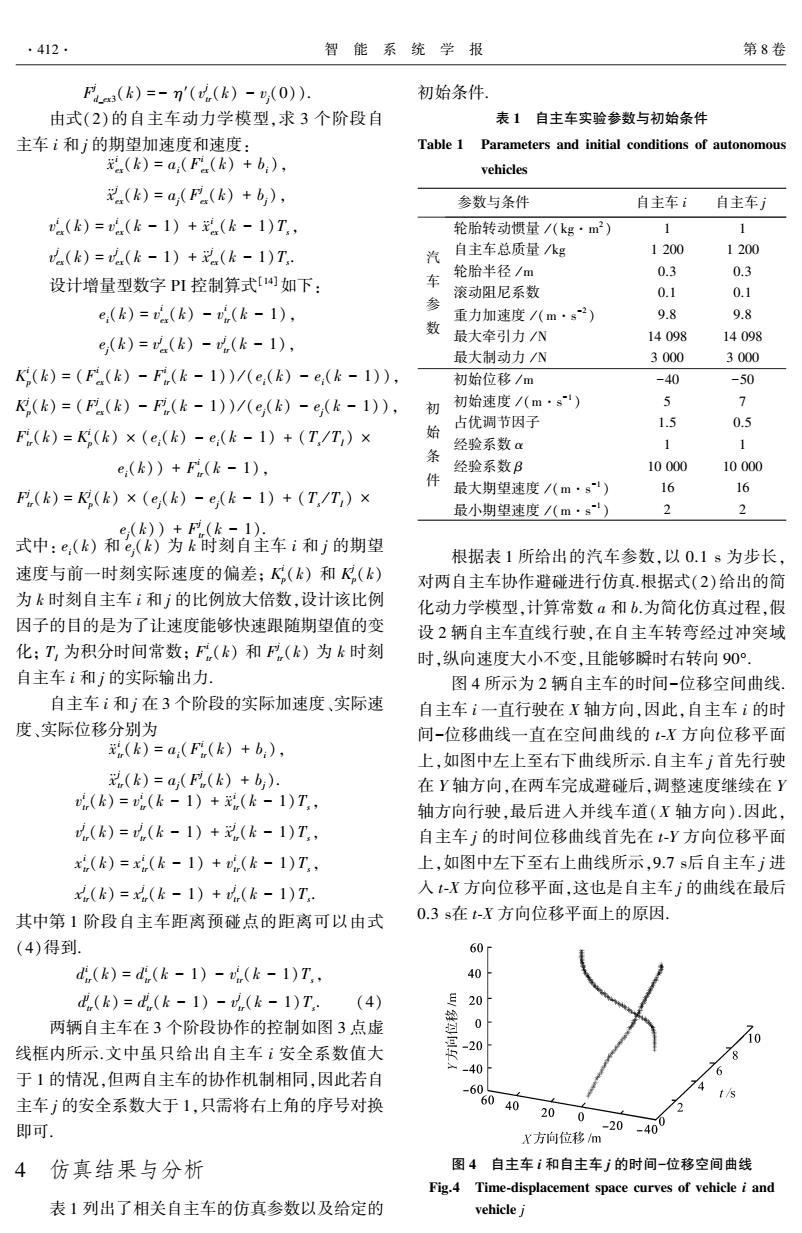
.412 智能系统学报 第8卷 F(k)=-7'((k)-(0) 初始条件 由式(2)的自主车动力学模型,求3个阶段自 表1自主车实验参数与初始条件 主车i和j的期望加速度和速度: Table 1 Parameters and initial conditions of autonomous (k)=a:(F(k)+b:), vehicles (k)=a(F(k)+b), 参数与条件 自主车i 自主车j (k)=d(k-1)+(k-1)T, 轮胎转动惯量/(kg·m2) 1 1 (k)=(k-1)+(k-1)T 汽 自主车总质量/kg 1200 1200 设计增量型数字PI控制算式4如下: 车 轮胎半径/m 0.3 0.3 滚动阻尼系数 0.1 0.1 e,(k)=t(k)-(k-1), 物 重力加速度/(m·s2) 9.8 9.8 数 e(k)=(k)-n(k-1), 最大牵引力N 14098 14098 最大制动力/N 3000 3000 K(k)=(F(k)-F(k-1))/(e.(k)-e,(k-1)), 初始位移/m -40 -50 (k)=(F(k)-F(k-1)/(e(k)-e(k-1)), 初 初始速度/(m·s) 5 > 占优调节因子 1.5 0.5 F(k)=K(k)×(e,(k)-e,(k-1)+(T,/T,)× 始 1 e,(k)+F(k-1), 紫 经验系数a 经验系数β 10000 10000 件 最大期望速度/(m·s) 16 16 F(k)=(k)×(e,(k)-e(k-1)+(T,/T,)× 最小期望速度/(m·s) 2 e(k))+F(k-1). 式中:e,(k)和e(k)为k时刻自主车i和j的期望 根据表1所给出的汽车参数,以0.1s为步长, 速度与前一时刻实际速度的偏差;(k)和(k) 对两自主车协作避碰进行仿真.根据式(2)给出的简 为k时刻自主车i和j的比例放大倍数,设计该比例 化动力学模型,计算常数a和b.为简化仿真过程,假 因子的目的是为了让速度能够快速跟随期望值的变 设2辆自主车直线行驶,在自主车转弯经过冲突域 化;T,为积分时间常数;F(k)和F(k)为k时刻 时,纵向速度大小不变,且能够瞬时右转向90° 自主车i和j的实际输出力. 图4所示为2辆自主车的时间-位移空间曲线 自主车i和j在3个阶段的实际加速度、实际速 自主车i一直行驶在X轴方向,因此,自主车i的时 度、实际位移分别为 间-位移曲线一直在空间曲线的t-X方向位移平面 x(k)=a,(F(k)+b:), 上,如图中左上至右下曲线所示.自主车首先行驶 (k)=a(F(k)+b) 在Y轴方向,在两车完成避碰后,调整速度继续在Y (k)=(k-1)+(k-1)T, 轴方向行驶,最后进入并线车道(X轴方向)因此, (k)=(k-1)+(k-1)T, 自主车j的时间位移曲线首先在t-Y方向位移平面 x(k)=x(k-1)+(k-1)T, 上,如图中左下至右上曲线所示,9.7s后自主车j进 xn(k)=x(k-1)+n(k-1)T 入t-X方向位移平面,这也是自主车j的曲线在最后 其中第1阶段自主车距离预碰点的距离可以由式 0.3s在t-X方向位移平面上的原因. (4)得到 60 d,(k)=d(k-1)-(k-1)T, 40 d(k)=(k-1)-n(k-1)T.(4) 20 两辆自主车在3个阶段协作的控制如图3点虚 0 10 线框内所示文中虽只给出自主车i安全系数值大 于1的情况,但两自主车的协作机制相同,因此若自 6 -60 4 6040 t/s 主车j的安全系数大于1,只需将右上角的序号对换 即可 200-20-406 X方向位移m 4仿真结果与分析 图4自主车i和自主车j的时间-位移空间曲线 Fig.4 Time-displacement space curves of vehicle i and 表1列出了相关自主车的仿真参数以及给定的 vehicle iF j d_ex3(k) = - η′(v j tr(k) - vj(0)). 由式(2)的自主车动力学模型ꎬ求 3 个阶段自 主车 i 和 j 的期望加速度和速度: x¨ i ex(k) = ai(F i ex(k) + bi)ꎬ x¨ j ex(k) = aj(F j ex(k) + bj)ꎬ v i ex(k) = v i ex(k - 1) + x¨ i ex(k - 1)Tsꎬ v j ex(k) = v j ex(k - 1) + x¨ j ex(k - 1)Ts . 设计增量型数字 PI 控制算式[14]如下: ei(k) = v i ex(k) - v i tr(k - 1)ꎬ ej(k) = v j ex(k) - v j tr(k - 1)ꎬ K i p(k) = (F i ex(k) - F i tr(k - 1)) / (ei(k) - ei(k - 1))ꎬ K j p(k) = (F j ex(k) - F j tr(k - 1)) / (ej(k) - ej(k - 1))ꎬ F i tr(k) = K i p(k) × (ei(k) - ei(k - 1) + (Ts / TI) × ei(k)) + F i tr(k - 1)ꎬ F j tr(k) = K j p(k) × (ej(k) - ej(k - 1) + (Ts / TI) × ej(k)) + F j tr(k - 1). 式中: ei(k) 和 ej(k) 为 k 时刻自主车 i 和 j 的期望 速度与前一时刻实际速度的偏差ꎻ K i p(k) 和 K j p(k) 为 k 时刻自主车 i 和 j 的比例放大倍数ꎬ设计该比例 因子的目的是为了让速度能够快速跟随期望值的变 化ꎻ TI 为积分时间常数ꎻ F i tr(k) 和 F j tr(k) 为 k 时刻 自主车 i 和 j 的实际输出力. 自主车 i 和 j 在 3 个阶段的实际加速度、实际速 度、实际位移分别为 x¨ i tr(k) = ai(F i tr(k) + bi)ꎬ x¨ j tr(k) = aj(F j tr(k) + bj). v i tr(k) = v i tr(k - 1) + x¨ i tr(k - 1)Tsꎬ v j tr(k) = v j tr(k - 1) + x¨ j tr(k - 1)Tsꎬ x i tr(k) = x i tr(k - 1) + v i tr(k - 1)Tsꎬ x j tr(k) = x j tr(k - 1) + v j tr(k - 1)Ts . 其中第 1 阶段自主车距离预碰点的距离可以由式 (4)得到. d i tr(k) = d i tr(k - 1) - v i tr(k - 1)Tsꎬ d j tr(k) = d j tr(k - 1) - v j tr(k - 1)Ts . (4) 两辆自主车在 3 个阶段协作的控制如图 3 点虚 线框内所示.文中虽只给出自主车 i 安全系数值大 于 1 的情况ꎬ但两自主车的协作机制相同ꎬ因此若自 主车 j 的安全系数大于 1ꎬ只需将右上角的序号对换 即可. 4 仿真结果与分析 表 1 列出了相关自主车的仿真参数以及给定的 初始条件. 表 1 自主车实验参数与初始条件 Table 1 Parameters and initial conditions of autonomous vehicles 参数与条件 自主车 i 自主车 j 汽 车 参 数 轮胎转动惯量 / (kgm 2 ) 1 1 自主车总质量 / kg 1 200 1 200 轮胎半径 / m 0.3 0.3 滚动阻尼系数 0.1 0.1 重力加速度 / (ms -2 ) 9.8 9.8 最大牵引力 / N 14 098 14 098 最大制动力 / N 3 000 3 000 初 始 条 件 初始位移 / m -40 -50 初始速度 / (ms -1 ) 5 7 占优调节因子 1.5 0.5 经验系数 α 1 1 经验系数 β 10 000 10 000 最大期望速度 / (ms -1 ) 16 16 最小期望速度 / (ms -1 ) 2 2 根据表 1 所给出的汽车参数ꎬ以 0.1 s 为步长ꎬ 对两自主车协作避碰进行仿真.根据式(2)给出的简 化动力学模型ꎬ计算常数 a 和 b.为简化仿真过程ꎬ假 设 2 辆自主车直线行驶ꎬ在自主车转弯经过冲突域 时ꎬ纵向速度大小不变ꎬ且能够瞬时右转向 90°. 图 4 所示为 2 辆自主车的时间-位移空间曲线. 自主车 i 一直行驶在 X 轴方向ꎬ因此ꎬ自主车 i 的时 间-位移曲线一直在空间曲线的 t ̄X 方向位移平面 上ꎬ如图中左上至右下曲线所示.自主车 j 首先行驶 在 Y 轴方向ꎬ在两车完成避碰后ꎬ调整速度继续在 Y 轴方向行驶ꎬ最后进入并线车道(X 轴方向).因此ꎬ 自主车 j 的时间位移曲线首先在 t ̄Y 方向位移平面 上ꎬ如图中左下至右上曲线所示ꎬ9.7 s后自主车 j 进 入 t ̄X 方向位移平面ꎬ这也是自主车 j 的曲线在最后 0.3 s在 t ̄X 方向位移平面上的原因. 图 4 自主车 i 和自主车 j 的时间-位移空间曲线 Fig.4 Time ̄displacement space curves of vehicle i and vehicle j 412 智 能 系 统 学 报 第 8 卷