正在加载图片...
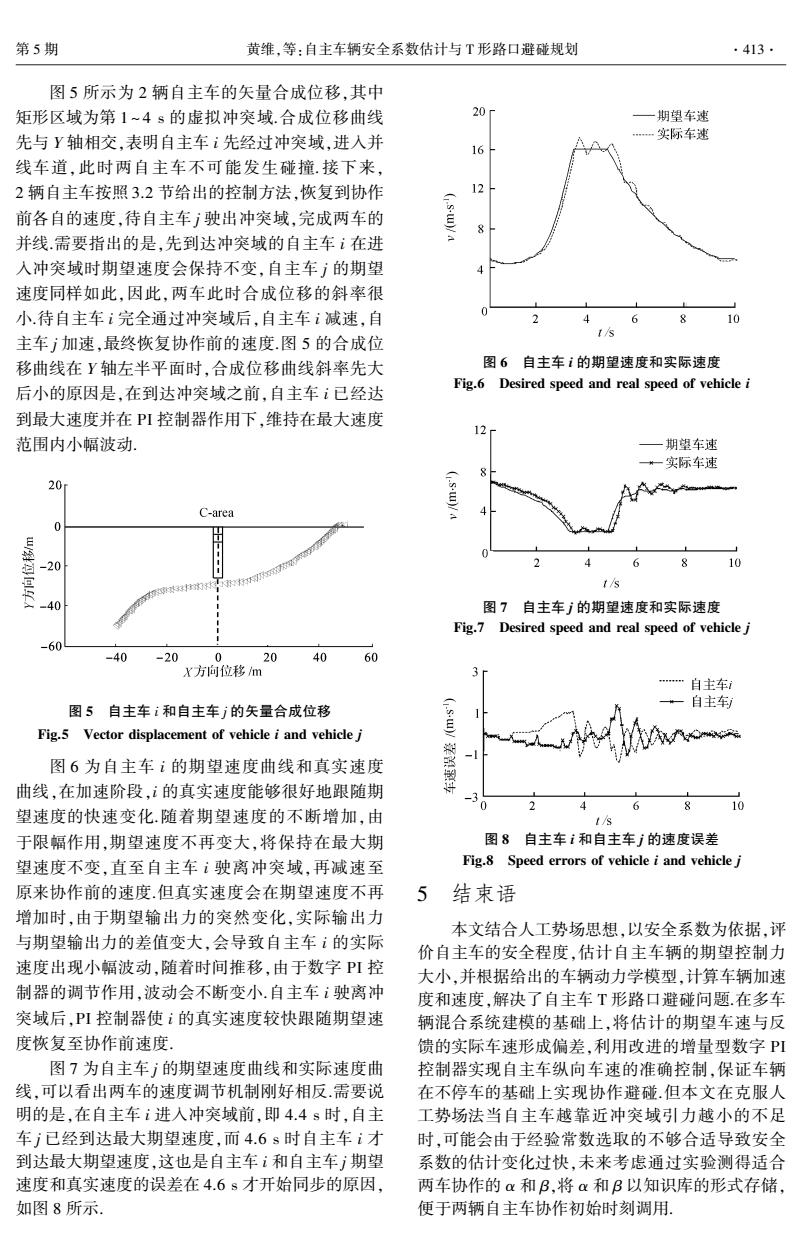
第5期 黄维,等:自主车辆安全系数估计与T形路口避碰规划 ·413· 图5所示为2辆自主车的矢量合成位移,其中 矩形区域为第1~4s的虚拟冲突域.合成位移曲线 20 一期望车速 先与Y轴相交,表明自主车i先经过冲突域,进入并 一实际车速 线车道,此时两自主车不可能发生碰撞接下来, 2辆自主车按照3.2节给出的控制方法,恢复到协作 12 前各自的速度,待自主车驶出冲突域,完成两车的 并线.需要指出的是,先到达冲突域的自主车i在进 入冲突域时期望速度会保持不变,自主车j的期望 速度同样如此,因此,两车此时合成位移的斜率很 小待自主车i完全通过冲突域后,自主车i减速,自 4 6 810 I/s 主车加速,最终恢复协作前的速度.图5的合成位 移曲线在Y轴左半平面时,合成位移曲线斜率先大 图6自主车i的期望速度和实际速度 后小的原因是,在到达冲突域之前,自主车i已经达 Fig.6 Desired speed and real speed of vehicle i 到最大速度并在P控制器作用下,维持在最大速度 范围内小幅波动 一期望车速 ”一实际车速 20 C-area 0 -20 6 8 10 1/s 图7自主车的期望速度和实际速度 Fig.7 Desired speed and real speed of vehicle j 60 -40 -20 20 40 60 X方向位移m …自主车i 自主车 图5自主车i和自主车的矢量合成位移 Fig.5 Vector displacement of vehicle i and vehicle j 图6为自主车i的期望速度曲线和真实速度 曲线,在加速阶段,i的真实速度能够很好地跟随期 4 6 10 望速度的快速变化.随着期望速度的不断增加,由 t/s 于限幅作用,期望速度不再变大,将保持在最大期 图8自主车i和自主车j的速度误差 望速度不变,直至自主车i驶离冲突域,再减速至 Fig.8 Speed errors of vehicle i and vehicle j 原来协作前的速度.但真实速度会在期望速度不再 5 结束语 增加时,由于期望输出力的突然变化,实际输出力 本文结合人工势场思想,以安全系数为依据,评 与期望输出力的差值变大,会导致自主车i的实际 价自主车的安全程度,估计自主车辆的期望控制力 速度出现小幅波动,随着时间推移,由于数字PI控 大小,并根据给出的车辆动力学模型,计算车辆加速 制器的调节作用,波动会不断变小.自主车i驶离冲 度和速度,解决了自主车T形路口避碰问题在多车 突域后,PI控制器使i的真实速度较快跟随期望速 辆混合系统建模的基础上,将估计的期望车速与反 度恢复至协作前速度 馈的实际车速形成偏差,利用改进的增量型数字PI 图7为自主车的期望速度曲线和实际速度曲 控制器实现自主车纵向车速的准确控制,保证车辆 线,可以看出两车的速度调节机制刚好相反.需要说 在不停车的基础上实现协作避碰.但本文在克服人 明的是,在自主车i进入冲突域前,即4.4s时,自主 工势场法当自主车越靠近冲突域引力越小的不足 车j已经到达最大期望速度,而4.6s时自主车i才 时,可能会由于经验常数选取的不够合适导致安全 到达最大期望速度,这也是自主车i和自主车j期望 系数的估计变化过快,未来考虑通过实验测得适合 速度和真实速度的误差在4.6s才开始同步的原因, 两车协作的α和B,将α和B以知识库的形式存储, 如图8所示 便于两辆自主车协作初始时刻调用.图 5 所示为 2 辆自主车的矢量合成位移ꎬ其中 矩形区域为第 1 ~ 4 s 的虚拟冲突域.合成位移曲线 先与 Y 轴相交ꎬ表明自主车 i 先经过冲突域ꎬ进入并 线车道ꎬ此时两自主车不可能发生碰撞. 接下来ꎬ 2 辆自主车按照 3.2 节给出的控制方法ꎬ恢复到协作 前各自的速度ꎬ待自主车 j 驶出冲突域ꎬ完成两车的 并线.需要指出的是ꎬ先到达冲突域的自主车 i 在进 入冲突域时期望速度会保持不变ꎬ自主车 j 的期望 速度同样如此ꎬ因此ꎬ两车此时合成位移的斜率很 小.待自主车 i 完全通过冲突域后ꎬ自主车 i 减速ꎬ自 主车 j 加速ꎬ最终恢复协作前的速度.图 5 的合成位 移曲线在 Y 轴左半平面时ꎬ合成位移曲线斜率先大 后小的原因是ꎬ在到达冲突域之前ꎬ自主车 i 已经达 到最大速度并在 PI 控制器作用下ꎬ维持在最大速度 范围内小幅波动. 图 5 自主车 i 和自主车 j 的矢量合成位移 Fig.5 Vector displacement of vehicle i and vehicle j 图 6 为自主车 i 的期望速度曲线和真实速度 曲线ꎬ在加速阶段ꎬi 的真实速度能够很好地跟随期 望速度的快速变化.随着期望速度的不断增加ꎬ由 于限幅作用ꎬ期望速度不再变大ꎬ将保持在最大期 望速度不变ꎬ直至自主车 i 驶离冲突域ꎬ再减速至 原来协作前的速度.但真实速度会在期望速度不再 增加时ꎬ由于期望输出力的突然变化ꎬ实际输出力 与期望输出力的差值变大ꎬ会导致自主车 i 的实际 速度出现小幅波动ꎬ随着时间推移ꎬ由于数字 PI 控 制器的调节作用ꎬ波动会不断变小.自主车 i 驶离冲 突域后ꎬPI 控制器使 i 的真实速度较快跟随期望速 度恢复至协作前速度. 图 7 为自主车 j 的期望速度曲线和实际速度曲 线ꎬ可以看出两车的速度调节机制刚好相反.需要说 明的是ꎬ在自主车 i 进入冲突域前ꎬ即 4.4 s 时ꎬ自主 车 j 已经到达最大期望速度ꎬ而 4.6 s 时自主车 i 才 到达最大期望速度ꎬ这也是自主车 i 和自主车 j 期望 速度和真实速度的误差在 4.6 s 才开始同步的原因ꎬ 如图 8 所示. 图 6 自主车 i 的期望速度和实际速度 Fig.6 Desired speed and real speed of vehicle i 图 7 自主车 j 的期望速度和实际速度 Fig.7 Desired speed and real speed of vehicle j 图 8 自主车 i 和自主车 j 的速度误差 Fig.8 Speed errors of vehicle i and vehicle j 5 结束语 本文结合人工势场思想ꎬ以安全系数为依据ꎬ评 价自主车的安全程度ꎬ估计自主车辆的期望控制力 大小ꎬ并根据给出的车辆动力学模型ꎬ计算车辆加速 度和速度ꎬ解决了自主车 T 形路口避碰问题.在多车 辆混合系统建模的基础上ꎬ将估计的期望车速与反 馈的实际车速形成偏差ꎬ利用改进的增量型数字 PI 控制器实现自主车纵向车速的准确控制ꎬ保证车辆 在不停车的基础上实现协作避碰.但本文在克服人 工势场法当自主车越靠近冲突域引力越小的不足 时ꎬ可能会由于经验常数选取的不够合适导致安全 系数的估计变化过快ꎬ未来考虑通过实验测得适合 两车协作的 α 和 βꎬ将 α 和 β 以知识库的形式存储ꎬ 便于两辆自主车协作初始时刻调用. 第 5 期 黄维ꎬ等:自主车辆安全系数估计与 T 形路口避碰规划 413