正在加载图片...
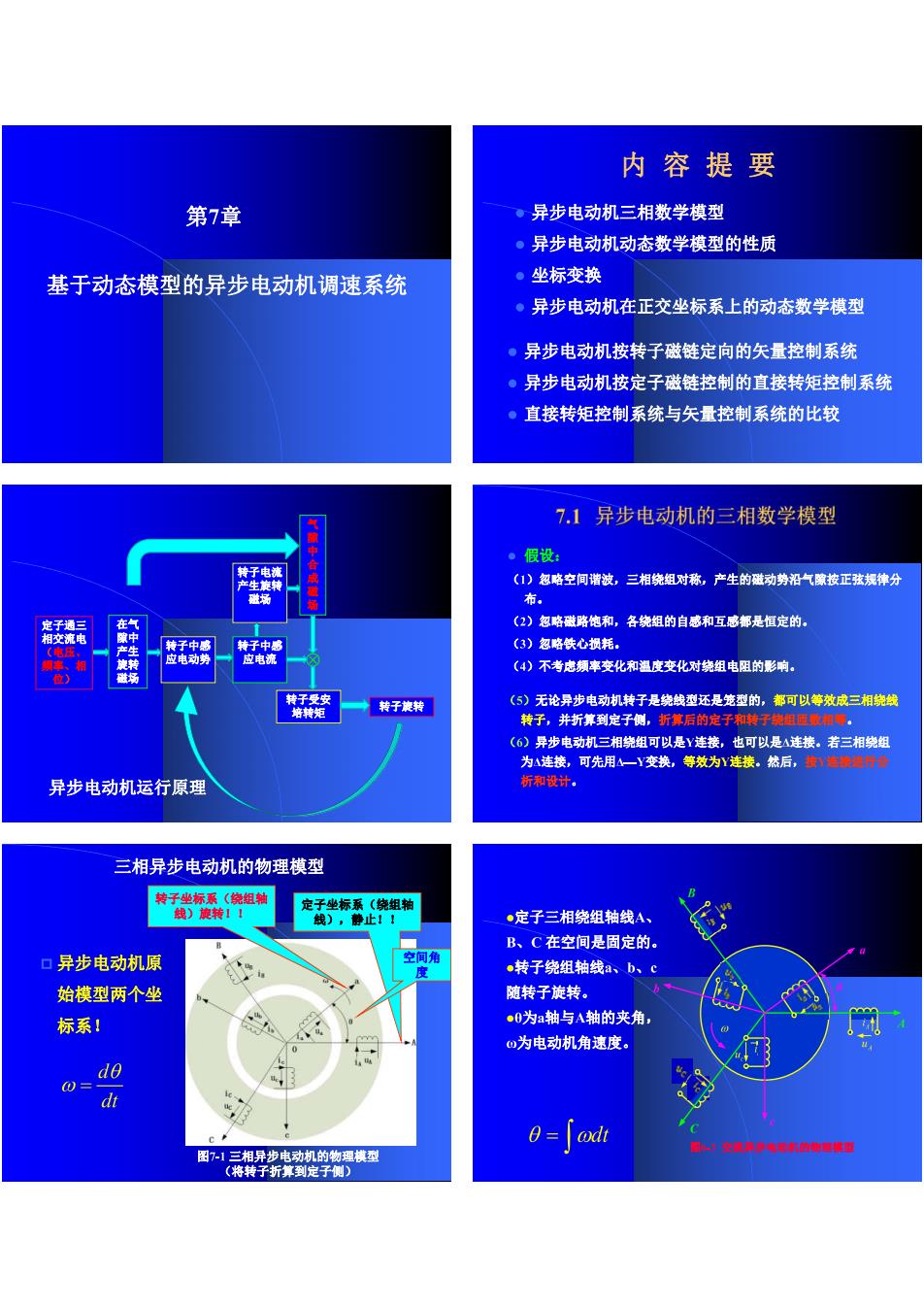
内容提要 第7章 。异步电动机三相数学模型 ·异步电动机动态数学模型的性质 基于动态模型的异步电动机调速系统 。坐标变换 。异步电动机在正交坐标系上的动态数学模型 。异步电动机按转子磁链定向的矢量控制系统 ·异步电动机按定子磁链控制的直接转矩控制系统 ·直接转矩控制系统与矢量控制系统的比较 7.1异步电动机的三相数学模型 。假设 (1)忽略空间诺被,三相绕组对桥,产生的融动势沿气隙按正弦规律分 布。 目西也 (2)忽略藏路饱和,各绕短的自感和互感都是恒定的, (3)忽略铁心损耗, (4)不考虑须率变化和温度变化对绕组电阻的影响。 (5)无论异步电动机特子是绕战型还是纯型的,都可以等效成三相镜线 转子,并折第到定子侧,后的 异步电动机运行原理 三相异步电动机的物理模型 定子三相绕组轴线 B、C在空间是固定的, 口异步电动机原 转子绕组粕线、b、c 始模型两个坐 随转子旋转。 标系! 0为n轴与A轴的夹角 如为电动机角速度 de 0=axdt 图正