正在加载图片...
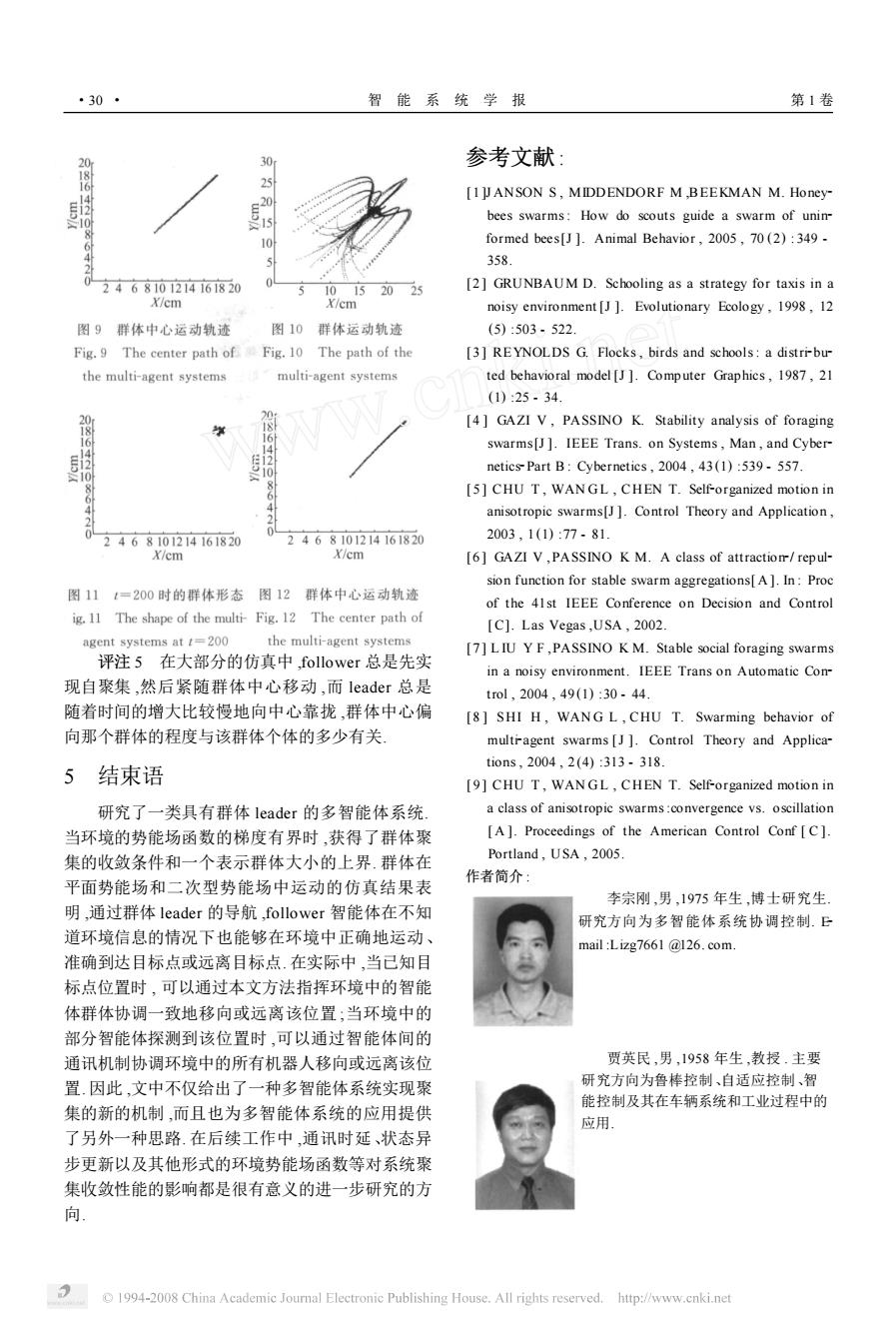
·30· 智能系统学报 第1卷 30 参考文献: 25 [1JANSON S,MIDDENDORF M ,BEEKMAN M.Honey- 10 bees swarms:How do scouts guide a swarm of unin- 4A6802a 10 formed bees[J ]Animal Behavior,2005,70(2):349- 358. 0 10152025 [2]GRUNBAUM D.Schooling as a strategy for taxis in a X/cm X/cm noisy environment [J ]Evolutionary Ecology,1998,12 图9群体中心运动轨迹 图10群体运动轨迹 (5):503.522 Fig.9 The center path of Fig.10 The path of the [3]REYNOLDS G.Flocks,birds and schools:a distri-bu the multi-agent systems multi-agent systems ted behavioral model [J ]Computer Graphics,1987,21 (1):25-34 20 20 [4]GAZI V,PASSINO K.Stability analysis of foraging 6 swarms[J].IEEE Trans.on Systems,Man,and Cyber- 4 10 10 netics-Part B:Cybernetics,2004,43(1):539-557. 6 8642 [5]CHU T,WANGL,CHEN T.Self-organized motion in anisotropic swarms[J].Control Theory and Application, 2468101214161820 00 2468101214161820 2003,1(1):77.81. X/em X/cm [6]GAZI V,PASSINO K M.A class of attractiom/repul- sion function for stable swarm aggregations[A].In:Proc 图111=200时的群体形态图12群体中心运动轨迹 of the 41st IEEE Conference on Decision and Control ig.11 The shape of the multi-Fig.12 The center path of [C].Las Vegas,USA,2002. agent systems at t=200 the multi-agent systems [7]LIU Y F,PASSINO K M.Stable social foraging swarms 评注5在大部分的仿真中,follower总是先实 in a noisy environment.IEEE Trans on Automatic Con- 现自聚集,然后紧随群体中心移动,而leader总是 trol,2004,49(1):30.44. 随着时间的增大比较慢地向中心靠拢,群体中心偏 [8]SHI H,WANG L,CHU T.Swarming behavior of 向那个群体的程度与该群体个体的多少有关 multr-agent swarms [J ]Control Theory and Applica- 5结束语 tions,2004,2(4):313.318. [9]CHU T,WANGL,CHEN T.Self-organized motion in 研究了一类具有群体leader的多智能体系统. a class of anisotropic swarms convergence vs.oscillation 当环境的势能场函数的梯度有界时,获得了群体聚 [A ]Proceedings of the American Control Conf C]. 集的收敛条件和一个表示群体大小的上界.群体在 Portland.USA,2005 作者简介: 平面势能场和二次型势能场中运动的仿真结果表 李宗刚,男,1975年生,博士研究生 明,通过群体leader的导航,follower智能体在不知 研究方向为多智能体系统协调控制. 道环境信息的情况下也能够在环境中正确地运动、 mail Lizg7661 @126.com. 准确到达目标点或远离目标点.在实际中,当已知目 标点位置时,可以通过本文方法指挥环境中的智能 体群体协调一致地移向或远离该位置:当环境中的 部分智能体探测到该位置时,可以通过智能体间的 通讯机制协调环境中的所有机器人移向或远离该位 贾英民,男,1958年生,教授.主要 置.因此,文中不仅给出了一种多智能体系统实现聚 研究方向为鲁棒控制、自适应控制、智 能控制及其在车辆系统和工业过程中的 集的新的机制,而且也为多智能体系统的应用提供 应用 了另外一种思路.在后续工作中,通讯时延、状态异 步更新以及其他形式的环境势能场函数等对系统聚 集收敛性能的影响都是很有意义的进一步研究的方 向 1994-2008 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.net评注 5 在大部分的仿真中 ,follower 总是先实 现自聚集 ,然后紧随群体中心移动 ,而 leader 总是 随着时间的增大比较慢地向中心靠拢 ,群体中心偏 向那个群体的程度与该群体个体的多少有关. 5 结束语 研究了一类具有群体 leader 的多智能体系统. 当环境的势能场函数的梯度有界时 ,获得了群体聚 集的收敛条件和一个表示群体大小的上界. 群体在 平面势能场和二次型势能场中运动的仿真结果表 明 ,通过群体 leader 的导航 ,follower 智能体在不知 道环境信息的情况下也能够在环境中正确地运动、 准确到达目标点或远离目标点. 在实际中 ,当已知目 标点位置时 , 可以通过本文方法指挥环境中的智能 体群体协调一致地移向或远离该位置 ;当环境中的 部分智能体探测到该位置时 ,可以通过智能体间的 通讯机制协调环境中的所有机器人移向或远离该位 置. 因此 ,文中不仅给出了一种多智能体系统实现聚 集的新的机制 ,而且也为多智能体系统的应用提供 了另外一种思路. 在后续工作中 ,通讯时延、状态异 步更新以及其他形式的环境势能场函数等对系统聚 集收敛性能的影响都是很有意义的进一步研究的方 向. 参考文献 : [1 ]J ANSON S , MIDDENDORF M ,BEEKMAN M. Honey2 bees swarms: How do scouts guide a swarm of unin2 formed bees[J ]. Animal Behavior , 2005 , 70 (2) : 349 - 358. [2 ] GRUNBAUM D. Schooling as a strategy for taxis in a noisy environment [J ]. Evolutionary Ecology , 1998 , 12 (5) :503 - 522. [3 ] REYNOLDS G. Flocks , birds and schools: a distri2bu2 ted behavioral model [J ]. Computer Graphics , 1987 , 21 (1) :25 - 34. [ 4 ] GAZI V , PASSINO K. Stability analysis of foraging swarms[J ]. IEEE Trans. on Systems , Man , and Cyber2 netics2Part B : Cybernetics , 2004 , 43 (1) :539 - 557. [ 5 ] CHU T , WAN G L , CHEN T. Self2organized motion in anisotropic swarms[J ]. Control Theory and Application , 2003 , 1 (1) :77 - 81. [6 ] GAZI V , PASSINO K M. A class of attraction2/ repul2 sion function for stable swarm aggregations[ A ]. In : Proc of the 41st IEEE Conference on Decision and Control [C]. Las Vegas ,USA , 2002. [ 7 ] L IU Y F ,PASSINO K M. Stable social foraging swarms in a noisy environment. IEEE Trans on Automatic Con2 trol , 2004 , 49 (1) :30 - 44. [8 ] SHI H , WAN G L , CHU T. Swarming behavior of multi2agent swarms [J ]. Control Theory and Applica2 tions , 2004 , 2 (4) :313 - 318. [ 9 ] CHU T , WAN G L , CHEN T. Self2organized motion in a class of anisotropic swarms:convergence vs. oscillation [ A ]. Proceedings of the American Control Conf [ C ]. Portland , USA , 2005. 作者简介 : 李宗刚 ,男 ,1975 年生 ,博士研究生. 研究方向为多智能体系统协调控制. E2 mail :Lizg7661 @126. com. 03 · 贾英民 ,男 ,1958 年生 ,教授 . 主要 研究方向为鲁棒控制、自适应控制、智 能控制及其在车辆系统和工业过程中的 应用. · 智 能 系 统 学 报 第 1 卷