正在加载图片...
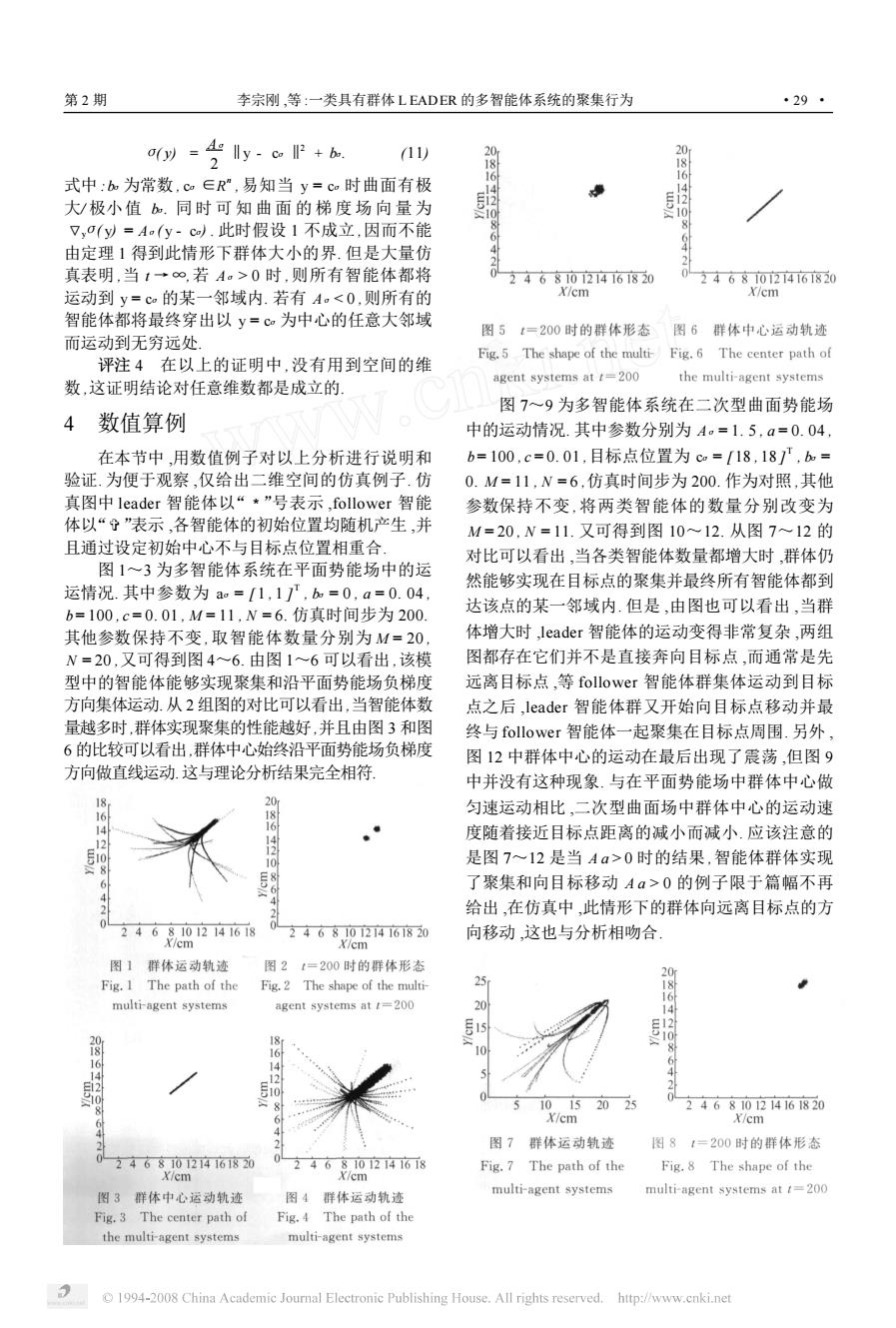
第2期 李宗刚,等:一类具有群体L EADER的多智能体系统的聚集行为 ·29· afy)=4 lly-col b 2 (11) 2086 式中:b为常数,ca∈R”,易知当y=ca时曲面有极 大/极小值.同时可知曲面的梯度场向量为 7,(y=A(y-c.此时假设1不成立,因而不能 由定理1得到此情形下群体大小的界.但是大量仿 真表明,当t→∞,若A。>0时,则所有智能体都将 2468101214161820 246810214161820 运动到y=c的某一邻域内.若有A。<0,则所有的 X/cm X/cm 智能体都将最终穿出以y=c为中心的任意大邻域 图5t=200时的群体形态 图6群体中心运动轨迹 而运动到无穷远处 Fig.5 The shape of the multi-Fig.6 The center path of 评注4在以上的证明中,没有用到空间的维 数,这证明结论对任意维数都是成立的, agent systems at t=200 the multi-agent systems 图7~9为多智能体系统在二次型曲面势能场 4 数值算例 中的运动情况.其中参数分别为A。=1.5,a=0.04, 在本节中,用数值例子对以上分析进行说明和 b=100,c=0.01,目标点位置为c=18,187',b加= 验证.为便于观察,仅给出二维空间的仿真例子.仿 0.M=11,N=6,仿真时间步为200.作为对照,其他 真图中leader智能体以“*”号表示,follower智能 参数保持不变,将两类智能体的数量分别改变为 体以“子”表示,各智能体的初始位置均随机产生,并 M=20,N=11.又可得到图10~12.从图7~12的 且通过设定初始中心不与目标点位置相重合 对比可以看出,当各类智能体数量都增大时,群体仍 图1~3为多智能体系统在平面势能场中的运 然能够实现在目标点的聚集并最终所有智能体都到 运情况.其中参数为a=1,11,b=0,a=0.04, b=100,c=0.01,M=11,N=6.仿真时间步为200. 达该点的某一邻域内.但是,由图也可以看出,当群 其他参数保持不变,取智能体数量分别为M=20, 体增大时,leader智能体的运动变得非常复杂,两组 N=20,又可得到图4~6.由图1~6可以看出,该模 图都存在它们并不是直接奔向目标点,而通常是先 型中的智能体能够实现聚集和沿平面势能场负梯度 远离目标点,等follower智能体群集体运动到目标 方向集体运动.从2组图的对比可以看出,当智能体数 点之后,leader智能体群又开始向目标点移动并最 量越多时,群体实现聚集的性能越好,并且由图3和图 终与follower智能体一起聚集在目标点周围.另外, 6的比较可以看出,群体中心始终沿平面势能场负梯度 图12中群体中心的运动在最后出现了震荡,但图9 方向做直线运动.这与理论分析结果完全相符 中并没有这种现象.与在平面势能场中群体中心做 20 16 18 匀速运动相比,二次型曲面场中群体中心的运动速 420 度随着接近目标点距离的减小而减小.应该注意的 号19 是图7~12是当Aa>0时的结果,智能体群体实现 了聚集和向目标移动Aa>0的例子限于篇幅不再 给出,在仿真中,此情形下的群体向远离目标点的方 24681012141618 X/cm 2468101214161820 向移动,这也与分析相吻合 X/cm 图1群体运动轨迹 图21=200时的群体形态 20 Fig.I The path of the Fig.2 The shape of the multi- 1 16 multi-agent systems agent systems at t=200 20 14 16 8 4 10 5 10 15 20 25 2468101214161820 642 X/cm X/cm 图7群体运动轨迹 图81=200时的群体形态 2468101214161820 681012141618 X/cm Fig.7 The path of the Fig.8 The shape of the X/cm 图3群体中心运动轨迹 图4群体运动轨迹 multi-agent systems multi-agent systems at t=200 Fig.3 The center path of Fig.4 The path of the the multi-agent systems multi-agent systems 1994-2008 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.netσ( y) = Aσ 2 ‖y - cσ ‖2 + bσ. (11) 式中 :bσ 为常数 , cσ ∈R n ,易知当 y = cσ 时曲面有极 大/ 极小值 bσ. 同 时 可 知 曲 面 的 梯 度 场 向 量 为 ý yσ( y) = Aσ( y - cσ) . 此时假设 1 不成立 ,因而不能 由定理 1 得到此情形下群体大小的界. 但是大量仿 真表明 ,当 t →∞,若 Aσ > 0 时 ,则所有智能体都将 运动到 y = cσ 的某一邻域内. 若有 Aσ < 0 ,则所有的 智能体都将最终穿出以 y = cσ 为中心的任意大邻域 而运动到无穷远处. 评注 4 在以上的证明中 ,没有用到空间的维 数 ,这证明结论对任意维数都是成立的. 4 数值算例 在本节中 ,用数值例子对以上分析进行说明和 验证. 为便于观察 ,仅给出二维空间的仿真例子. 仿 真图中 leader 智能体以“3 ”号表示 ,follower 智能 体以“× ”表示 ,各智能体的初始位置均随机产生 ,并 且通过设定初始中心不与目标点位置相重合. 图 1~3 为多智能体系统在平面势能场中的运 运情况. 其中参数为 aσ = [ 1 , 1 ] T , bσ = 0 , a = 0. 04 , b = 100 , c = 0. 01 , M = 11 , N = 6. 仿真时间步为 200. 其他参数保持不变 , 取智能体数量分别为 M = 20 , N = 20 ,又可得到图 4~6. 由图 1~6 可以看出 ,该模 型中的智能体能够实现聚集和沿平面势能场负梯度 方向集体运动.从 2 组图的对比可以看出,当智能体数 量越多时,群体实现聚集的性能越好,并且由图 3 和图 6 的比较可以看出,群体中心始终沿平面势能场负梯度 方向做直线运动.这与理论分析结果完全相符. 图 7~9 为多智能体系统在二次型曲面势能场 中的运动情况. 其中参数分别为 Aσ = 1. 5 , a = 0. 04 , b = 100 , c = 0. 01 ,目标点位置为 cσ = [18 , 18 ] T , bσ = 0. M = 11 , N = 6 ,仿真时间步为 200. 作为对照 ,其他 参数保持不变 , 将两类智能体的数量分别改变为 M = 20 , N = 11. 又可得到图 10~12. 从图 7~12 的 对比可以看出 ,当各类智能体数量都增大时 ,群体仍 然能够实现在目标点的聚集并最终所有智能体都到 达该点的某一邻域内. 但是 ,由图也可以看出 ,当群 体增大时 ,leader 智能体的运动变得非常复杂 ,两组 图都存在它们并不是直接奔向目标点 ,而通常是先 远离目标点 ,等 follower 智能体群集体运动到目标 点之后 ,leader 智能体群又开始向目标点移动并最 终与follower 智能体一起聚集在目标点周围. 另外 , 图 12 中群体中心的运动在最后出现了震荡 ,但图 9 中并没有这种现象. 与在平面势能场中群体中心做 匀速运动相比 ,二次型曲面场中群体中心的运动速 度随着接近目标点距离的减小而减小. 应该注意的 是图 7~12 是当 A a > 0 时的结果 ,智能体群体实现 了聚集和向目标移动 A a > 0 的例子限于篇幅不再 给出 ,在仿真中 ,此情形下的群体向远离目标点的方 向移动 ,这也与分析相吻合. 第 2 期 李宗刚 ,等 :一类具有群体 L EADER 的多智能体系统的聚集行为 · 92 ·