正在加载图片...
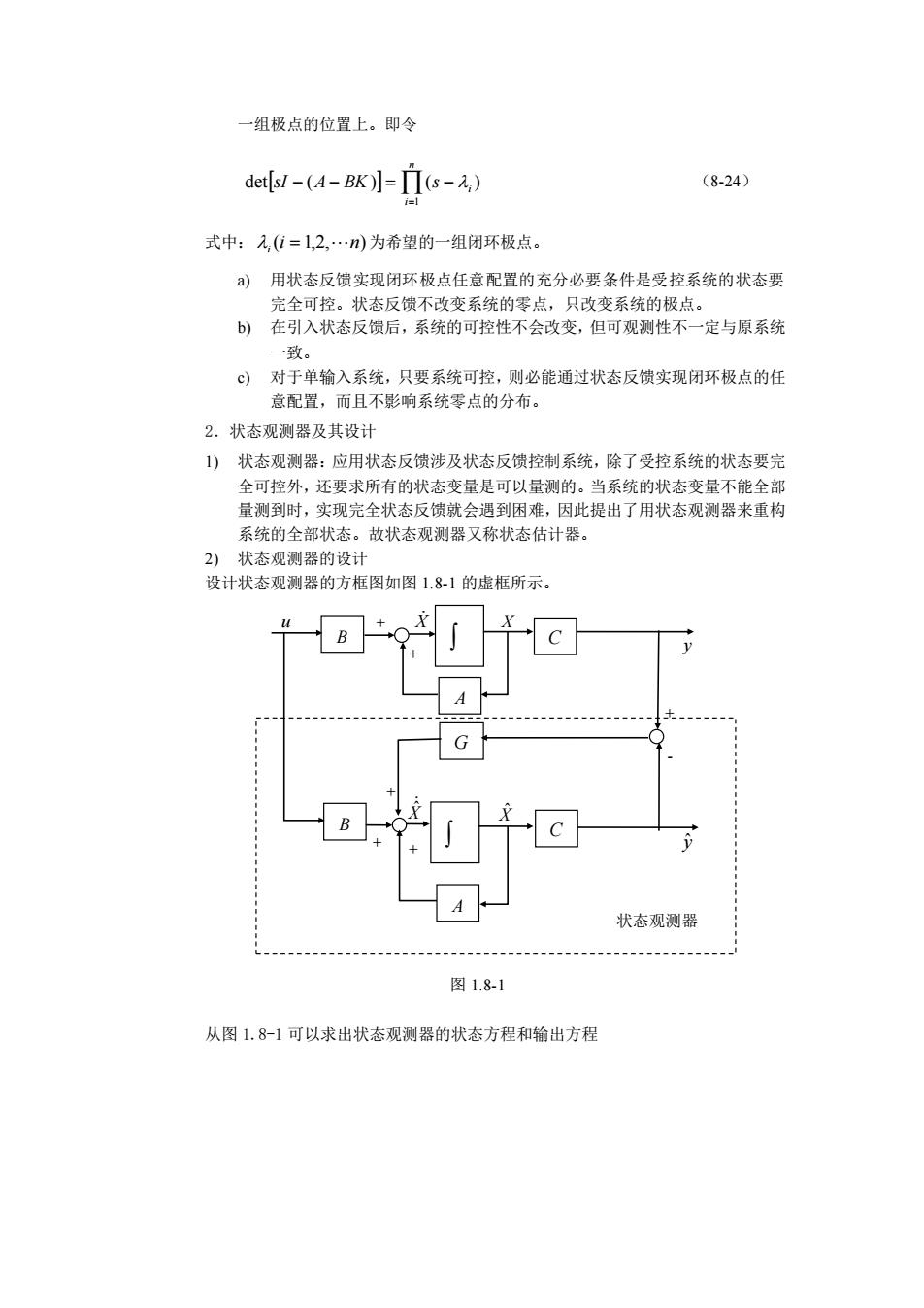
一组极点的位置上。即令 det[s/-(4-BK)]-ITs2) (8-24) 式中:,(位=1,2,…n)为希望的一组闭环极点。 )用状态反馈实现闭环极点任意配置的充分必要条件是受控系统的状态要 完全可控。状态反馈不改变系统的零点,只改变系统的极点。 b)在引入状态反馈后,系统的可控性不会改变,但可观测性不一定与原系统 一致。 ©)对于单输入系统,只要系统可控,则必能通过状态反馈实现闭环极点的任 意配置,而且不影响系统零点的分布。 2.状态观测器及其设计 )状态观测器:应用状态反馈涉及状态反馈控制系统,除了受控系统的状态要完 全可控外,还要求所有的状态变量是可以量测的。当系统的状态变量不能全音 量测到时,实现完全状态反馈就会遇到困难,因此提出了用状态观测器来重构 系统的全部状态。故状态观测器又称状态估计器。 2)状态观测器的设计 设计状态观测器的方框图如图1.81的虚框所示 B G LB一 状态观测器 图1.8-1 从图1.8-1可以求出状态观测器的状态方程和输出方程 一组极点的位置上。即令 = − − = − n i i sI A BK s 1 det ( ) ( ) (8-24) 式中: (i 1,2, n) i = 为希望的一组闭环极点。 a) 用状态反馈实现闭环极点任意配置的充分必要条件是受控系统的状态要 完全可控。状态反馈不改变系统的零点,只改变系统的极点。 b) 在引入状态反馈后,系统的可控性不会改变,但可观测性不一定与原系统 一致。 c) 对于单输入系统,只要系统可控,则必能通过状态反馈实现闭环极点的任 意配置,而且不影响系统零点的分布。 2.状态观测器及其设计 1) 状态观测器:应用状态反馈涉及状态反馈控制系统,除了受控系统的状态要完 全可控外,还要求所有的状态变量是可以量测的。当系统的状态变量不能全部 量测到时,实现完全状态反馈就会遇到困难,因此提出了用状态观测器来重构 系统的全部状态。故状态观测器又称状态估计器。 2) 状态观测器的设计 设计状态观测器的方框图如图 1.8-1 的虚框所示。 从图 1.8-1 可以求出状态观测器的状态方程和输出方程 G X X ˆ X X ˆ y y ˆ B A C u B A C + - + + + + + 状态观测器 图 1.8-1