正在加载图片...
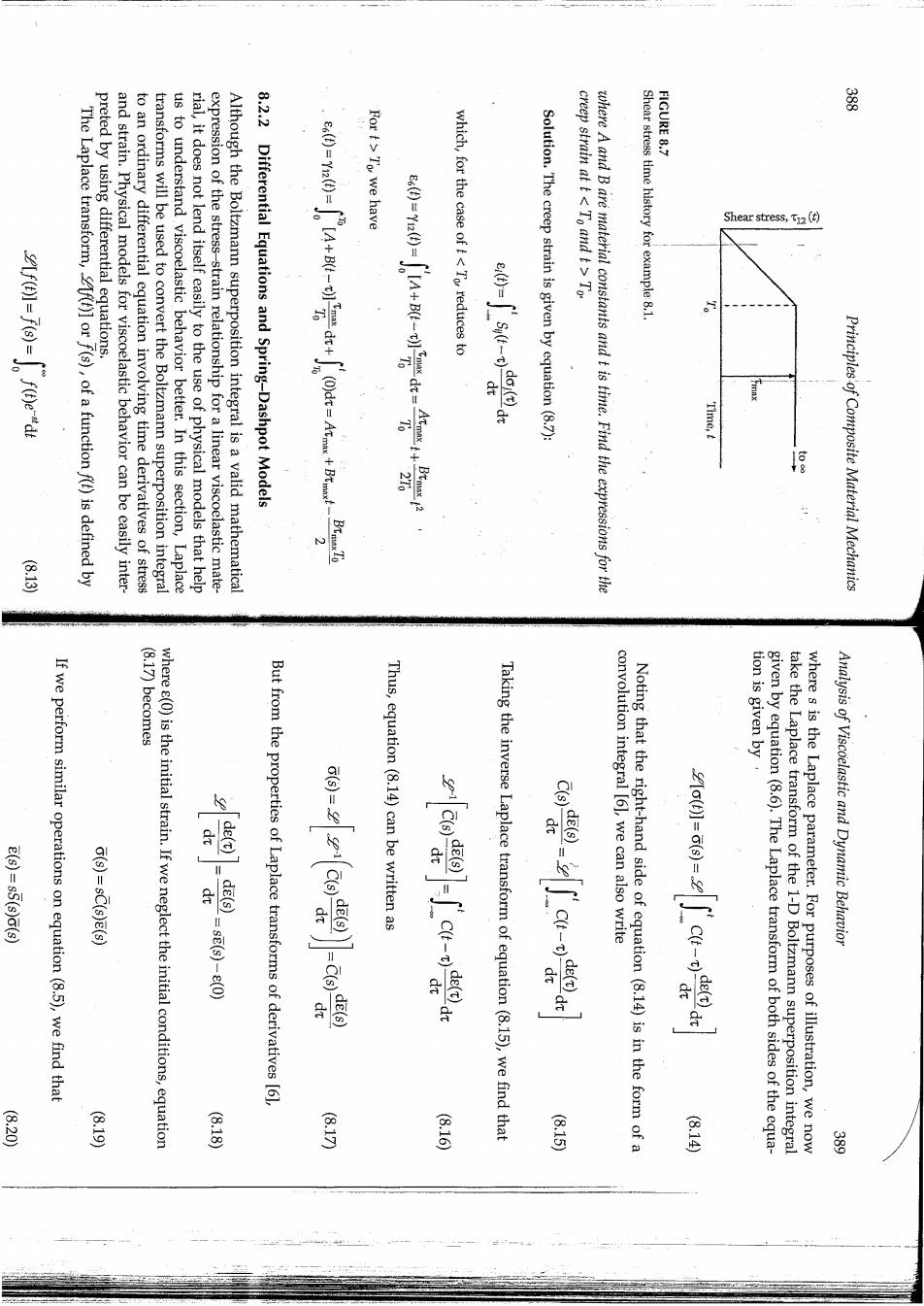
FIGURE 8.7 第 The Laplace transform,f(t)]or f(s),of a function f(t)is defined by preted by using differential equations. and strain.Physical models for viscoelastic behavior can be easily inter to an ordinary differential equation involving time derivatives of stress transforms will be used to convert the Boltzmann superposition integral us to understand viscoelastic behavior better.In this section,Laplace rial,it does not lend itself easily to the use of physical models that help expression of the stress-strain relationship for a linear viscoelastic mate- Although the Boltzmann superposition integral is a valid mathematical 8.2.2 Differential Equations and Spring-Dashpot Models For t>To,we have which,for the case of <To,reduces to Solution.The creep strain is given by equation(8.7): creep strain at t<To and t>To where A and B are material constants and t is time.Find the expressions for the Shear stress time history for example 8.1. Shear stress,() Time,t Principles of Composite Material Mechanics (8.17)becomes If we perform similar operations on equation(8.5),we find that where e(0)is the initial strain.If we neglect the initial conditions,equation But from the properties of Laplace transforms of derivatives [61, Thus,equation (8.14)can be written as Taking the inverse Laplace transform of equation(8.15),we find that convolution integral [61,we can also write tion is given by' Noting that the right-hand side of equation(8.14)is in the form of a given by equation(8.6).The Laplace transform of both sides of the equa- take the Laplace transform of the 1-D Boltzmann superposition integral where s is the Laplace parameter.For purposes of illustration,we now Analysis of Viscoelastic and Dynamic Behavior 8.20 (810 (6·18) 81M (816) (615 骂