正在加载图片...
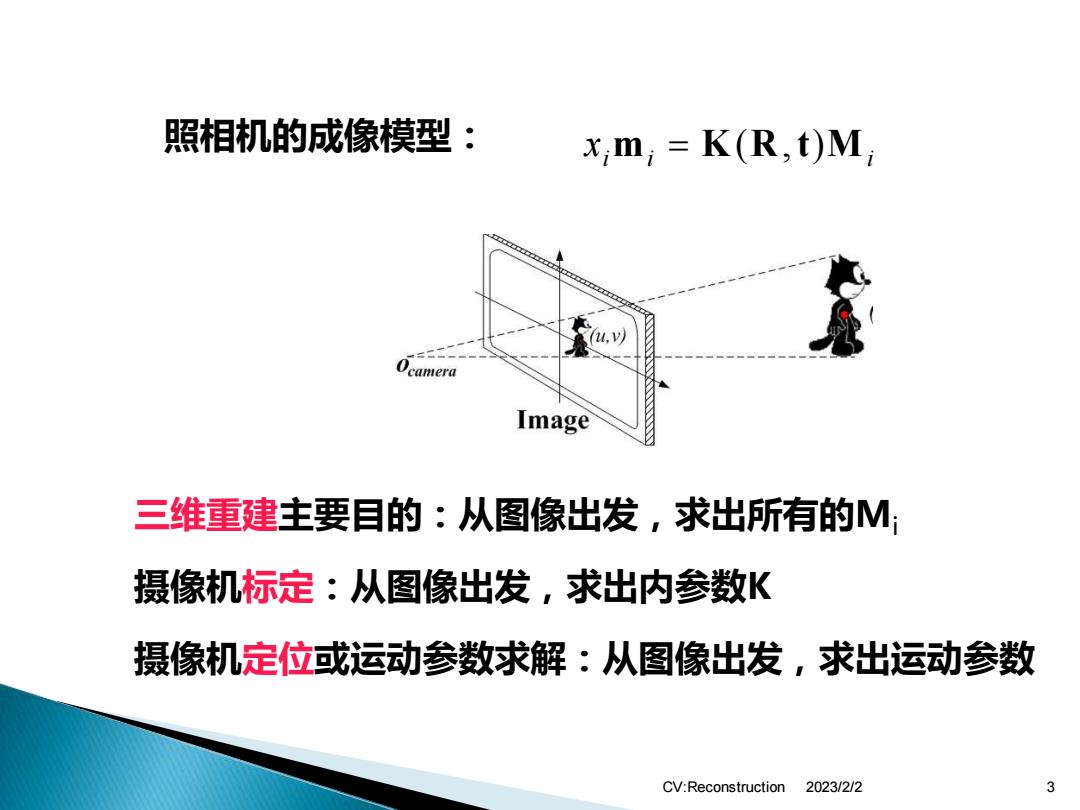
照相机的成像模型: x m;=K(R,t)M E2- Ocamera Image 三维重建主要目的:从图像出发,求出所有的M: 摄像机标定:从图像出发,求出内参数K 摄像机定位或运动参数求解:从图像出发,求出运动参数 CV:Reconstruction 2023/2/2 3CV:Reconstruction 2023/2/2 3 照相机的成像模型: i i i x m = K(R,t)Μ 三维重建主要目的:从图像出发,求出所有的Mi 摄像机标定:从图像出发,求出内参数K 摄像机定位或运动参数求解:从图像出发,求出运动参数