正在加载图片...
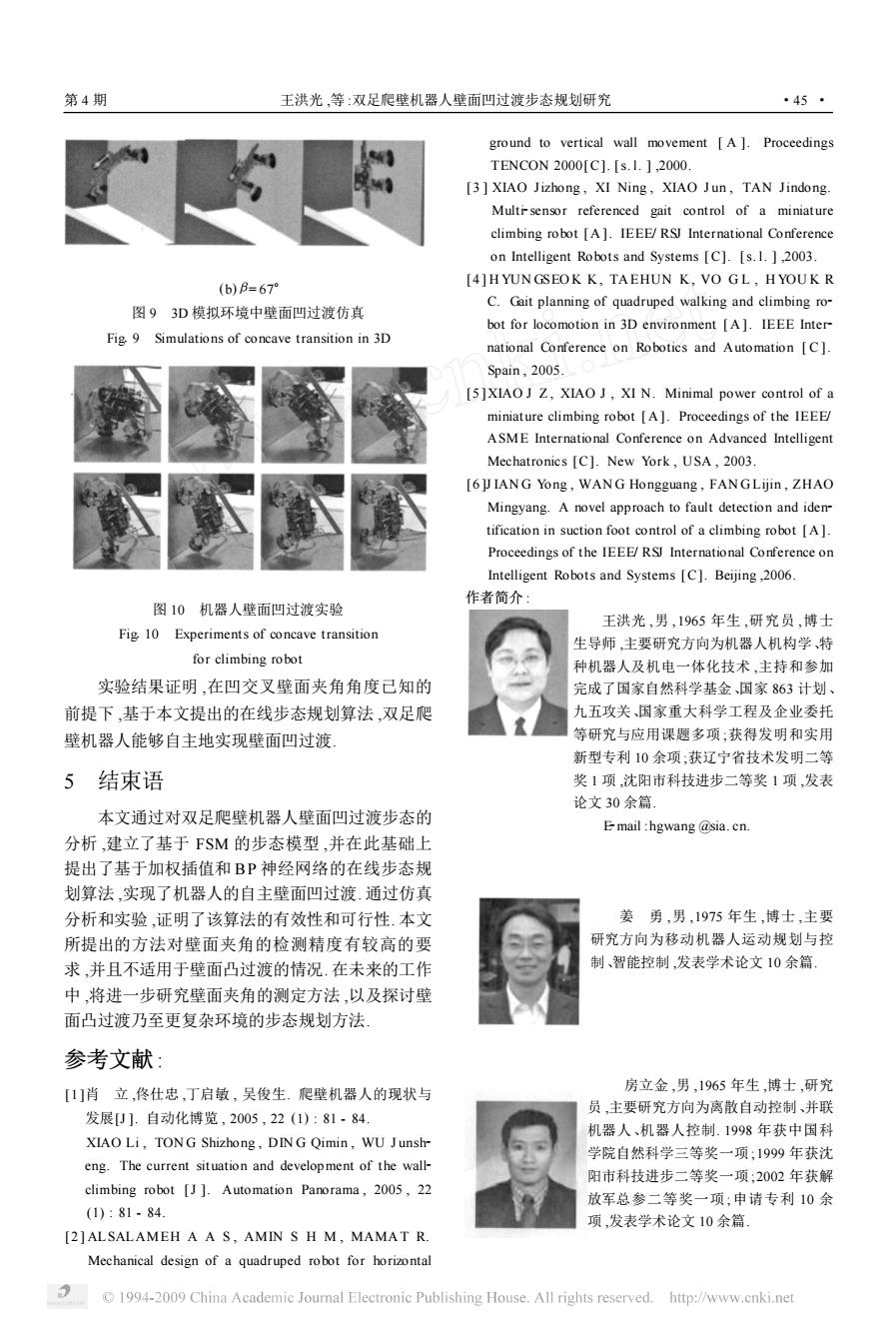
第4期 王洪光,等:双足爬壁机器人壁面凹过渡步态规划研究 ·45· ground to vertical wall movement [A ]Proceedings TENCON2000[C].[s.1.J,2000. [3 XIAO Jizhong,XI Ning,XIAO Jun,TAN Jindong. Multi-sensor referenced gait control of a miniature climbing robot [A ]IEEE/RSJ International Conference on Intelligent Robots and Systems [C].[s.1.],2003. (b)B=67 [4]HYUNGSEOK K,TAEHUN K,VO GL,HYOUK R 图93D模拟环境中壁面凹过渡仿真 C.Gait planning of quadruped walking and climbing ro- bot for locomotion in 3D environment [A].IEEE Inter- Fig 9 Simulations of concave transition in 3D national Conference on Robotics and Automation [C]. Spain,2005. [5]XIAO J Z,XIAO J,XI N.Minimal power control of a miniature climbing robot [A].Proceedings of the IEEE/ ASME International Conference on Advanced Intelligent Mechatronics [C].New York,USA,2003. [6JIANG Yong,WANG Hongguang,FANGLijin,ZHAO Mingyang.A novel approach to fault detection and iden tification in suction foot control of a climbing robot [A]. Proceedings of the IEEE/RSI International Conference on Intelligent Robots and Systems [C].Beijing,2006. 作者简介: 图10机器人壁面凹过渡实验 王洪光,男,1965年生,研究员,博士 Fig 10 Experiments of concave transition 生导师,主要研究方向为机器人机构学、特 for climbing robot 种机器人及机电一体化技术,主持和参加 实验结果证明,在凹交叉壁面夹角角度已知的 完成了国家自然科学基金、国家863计划、 前提下,基于本文提出的在线步态规划算法,双足爬 九五攻关国家重大科学工程及企业委托 壁机器人能够自主地实现壁面凹过渡 等研究与应用课题多项;获得发明和实用 新型专利10余项,获辽宁省技术发明二等 5结束语 奖1项,沈阳市科技进步二等奖1项,发表 论文30余篇 本文通过对双足爬壁机器人壁面凹过渡步态的 Email hgwang @sia.cn. 分析,建立了基于FSM的步态模型,并在此基础上 提出了基于加权插值和BP神经网络的在线步态规 划算法,实现了机器人的自主壁面凹过渡.通过仿真 分析和实验,证明了该算法的有效性和可行性.本文 姜勇,男,1975年生,博士,主要 所提出的方法对壁面夹角的检测精度有较高的要 研究方向为移动机器人运动规划与控 求,并且不适用于壁面凸过渡的情况.在未来的工作 制、智能控制,发表学术论文10余篇. 中,将进一步研究壁面夹角的测定方法,以及探讨壁 面凸过渡乃至更复杂环境的步态规划方法, 参考文献: [1]肖立,佟仕忠,丁启敏,吴俊生.爬壁机器人的现状与 房立金,男,1965年生,博士,研究 员,主要研究方向为离散自动控制、并联 发展].自动化博览,2005,22(1):81-84. 机器人、机器人控制.1998年获中国科 XIAO Li,TONG Shizhong,DIN G Qimin,WU Junsh- 学院自然科学三等奖一项,1999年获沈 eng.The current situation and development of the wall- 阳市科技进步二等奖一项;2002年获解 climbing robot [J ]Automation Panorama,2005,22 放军总参二等奖一项:申请专利10余 (1):81-84. 项,发表学术论文10余篇 [2]ALSALAMEH AA S,AMIN S H M,MAMAT R. Mechanical design of a quadruped robot for horizontal 1994-2009 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.net(b)β= 67° 图 9 3D 模拟环境中壁面凹过渡仿真 Fig19 Simulations of concave transition in 3D 图 10 机器人壁面凹过渡实验 Fig110 Experiments of concave transition for climbing robot 实验结果证明 ,在凹交叉壁面夹角角度已知的 前提下 ,基于本文提出的在线步态规划算法 ,双足爬 壁机器人能够自主地实现壁面凹过渡. 5 结束语 本文通过对双足爬壁机器人壁面凹过渡步态的 分析 ,建立了基于 FSM 的步态模型 ,并在此基础上 提出了基于加权插值和 BP 神经网络的在线步态规 划算法 ,实现了机器人的自主壁面凹过渡. 通过仿真 分析和实验 ,证明了该算法的有效性和可行性. 本文 所提出的方法对壁面夹角的检测精度有较高的要 求 ,并且不适用于壁面凸过渡的情况. 在未来的工作 中 ,将进一步研究壁面夹角的测定方法 ,以及探讨壁 面凸过渡乃至更复杂环境的步态规划方法. 参考文献 : [1 ]肖 立 ,佟仕忠 ,丁启敏 , 吴俊生. 爬壁机器人的现状与 发展[J ]. 自动化博览 , 2005 , 22 (1) : 81 - 84. XIAO Li , TON G Shizhong , DIN G Qimin , WU J unsh2 eng. The current situation and development of the wall2 climbing robot [J ]. Automation Panorama , 2005 , 22 (1) : 81 - 84. [2 ] ALSALAMEH A A S , AMIN S H M , MAMA T R. Mechanical design of a quadruped robot for horizontal ground to vertical wall movement [ A ]. Proceedings TENCON 2000[C]. [s. l. ] ,2000. [3 ] XIAO Jizhong , XI Ning , XIAO J un , TAN Jindong. Multi2sensor referenced gait control of a miniature climbing robot [ A ]. IEEE/ RSJ International Conference on Intelligent Robots and Systems [C]. [s. l. ] ,2003. [4 ] H YUN GSEO K K , TA EHUN K , VO G L , H YOU K R C. Gait planning of quadruped walking and climbing ro2 bot for locomotion in 3D environment [ A ]. IEEE Inter2 national Conference on Robotics and Automation [ C ]. Spain , 2005. [5 ]XIAO J Z , XIAO J , XI N. Minimal power control of a miniature climbing robot [ A ]. Proceedings of the IEEE/ ASME International Conference on Advanced Intelligent Mechatronics [C]. New York , USA , 2003. [6 ]J IAN G Yong , WAN G Hongguang , FAN GLijin , ZHAO Mingyang. A novel approach to fault detection and iden2 tification in suction foot control of a climbing robot [A ]. Proceedings of the IEEE/ RSJ International Conference on Intelligent Robots and Systems [C]. Beijing ,2006. 作者简介 : 王洪光 ,男 ,1965 年生 ,研究员 ,博士 生导师 ,主要研究方向为机器人机构学、特 种机器人及机电一体化技术 ,主持和参加 完成了国家自然科学基金、国家 863 计划、 九五攻关、国家重大科学工程及企业委托 等研究与应用课题多项 ;获得发明和实用 新型专利 10 余项 ;获辽宁省技术发明二等 奖 1 项 ,沈阳市科技进步二等奖 1 项 ,发表 论文 30 余篇. E2mail :hgwang @sia. cn. 姜 勇 ,男 ,1975 年生 ,博士 ,主要 研究方向为移动机器人运动规划与控 制、智能控制 ,发表学术论文 10 余篇. 房立金 ,男 ,1965 年生 ,博士 ,研究 员 ,主要研究方向为离散自动控制、并联 机器人、机器人控制. 1998 年获中国科 学院自然科学三等奖一项 ;1999 年获沈 阳市科技进步二等奖一项 ;2002 年获解 放军总参二等奖一项 ;申请专利 10 余 项 ,发表学术论文 10 余篇. 第 4 期 王洪光 ,等 :双足爬壁机器人壁面凹过渡步态规划研究 ·45 ·