正在加载图片...
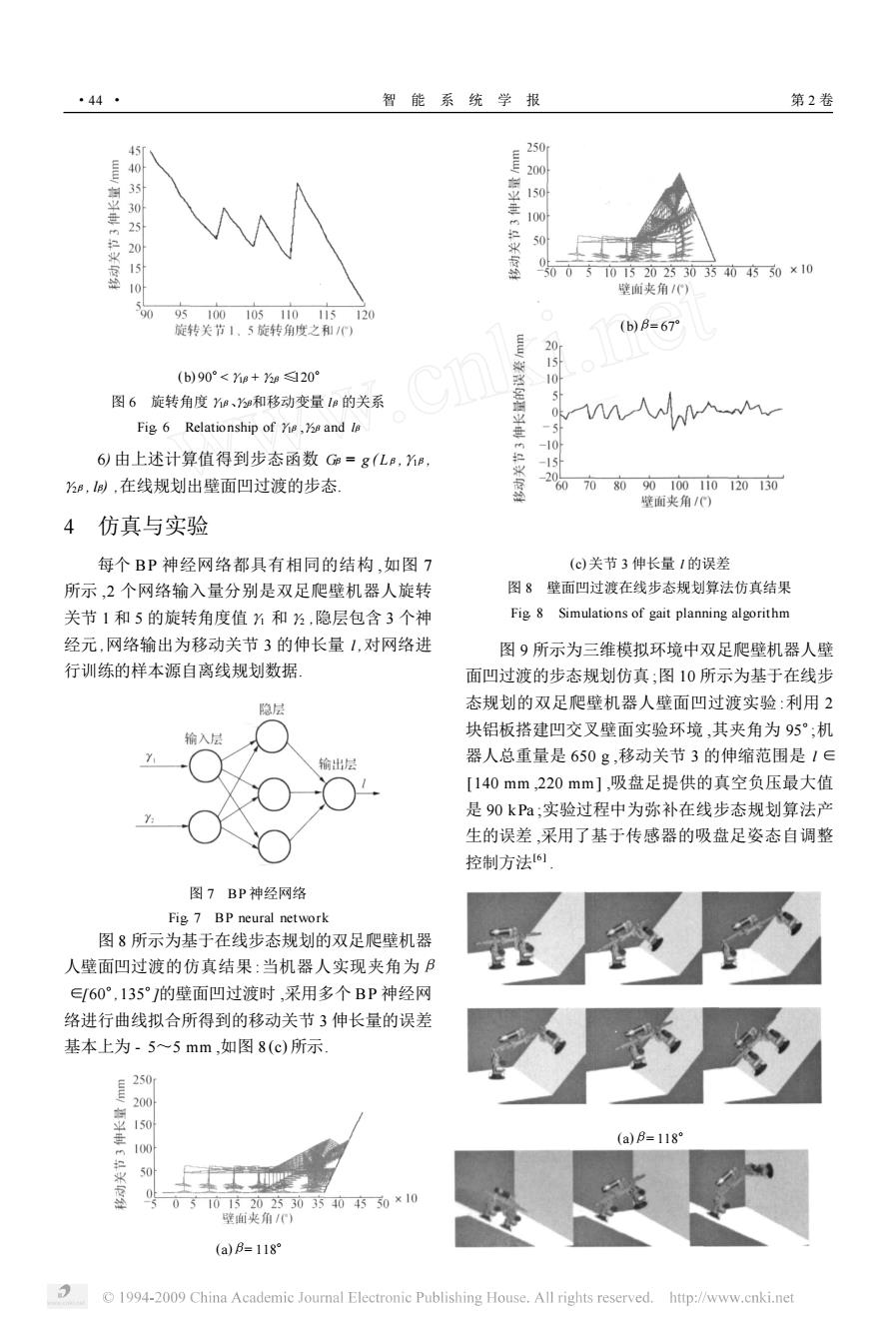
·44 智能系统学报 第2卷 45 250 200 30250 150 100 500了10152023303方404$50×10 10 壁面夹角/) 90 95100105110115120 旋转关节1、5旋转角度之和心) (b)B=67 0 15 (b)90°<a+1g☒209 图6旋转角度he、9和移动变量1e的关系 5 Fig 6 Relationship of Yis,and le -10 6)由上述计算值得到步态函数G=g(L,当B, ,),在线规划出壁面凹过渡的步态. -20607080 90100110120130 壁面夹角/) 4仿真与实验 每个BP神经网络都具有相同的结构,如图7 (c)关节3伸长量1的误差 所示,2个网络输入量分别是双足爬壁机器人旋转 图8壁面凹过渡在线步态规划算法仿真结果 关节1和5的旋转角度值1和,隐层包含3个神 Fig 8 Simulations of gait planning algorithm 经元,网络输出为移动关节3的伸长量1,对网络进 图9所示为三维模拟环境中双足爬壁机器人壁 行训练的样本源自离线规划数据, 面凹过渡的步态规划仿真:图10所示为基于在线步 隐层 态规划的双足爬壁机器人壁面凹过渡实验:利用2 输入层 块铝板搭建凹交叉壁面实验环境,其夹角为95°;机 输出层 器人总重量是650g,移动关节3的伸缩范围是1∈ [140mm,220mm],吸盘足提供的真空负压最大值 是90kPa,实验过程中为弥补在线步态规划算法产 生的误差,采用了基于传感器的吸盘足姿态自调整 控制方法1 图7BP神经网络 Fig 7 BP neural network 图8所示为基于在线步态规划的双足爬壁机器 人壁面凹过渡的仿真结果:当机器人实现夹角为B ∈60°,135°J的壁面凹过渡时,采用多个BP神经网 络进行曲线拟合所得到的移动关节3伸长量的误差 基本上为-5~5mm,如图8(c)所示 250 200 100 (a)B=118 上 01052025050务50×10 壁面夹角/) (a)B=118 1994-2009 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.net(b) 90°<γ1β +γ2β ≤120° 图 6 旋转角度γ1β、γ2β和移动变量 lβ 的关系 Fig16 Relationship of γ1β ,γ2β and lβ 6) 由上述计算值得到步态函数 Gβ = g ( Lβ ,γ1β, γ2β , lβ) ,在线规划出壁面凹过渡的步态. 4 仿真与实验 每个 BP 神经网络都具有相同的结构 ,如图 7 所示 ,2 个网络输入量分别是双足爬壁机器人旋转 关节 1 和 5 的旋转角度值γ1 和γ2 ,隐层包含 3 个神 经元 ,网络输出为移动关节 3 的伸长量 l ,对网络进 行训练的样本源自离线规划数据. 图 7 BP 神经网络 Fig17 BP neural network 图 8 所示为基于在线步态规划的双足爬壁机器 人壁面凹过渡的仿真结果 :当机器人实现夹角为β ∈[60°,135°]的壁面凹过渡时 ,采用多个 BP 神经网 络进行曲线拟合所得到的移动关节 3 伸长量的误差 基本上为 - 5~5 mm ,如图 8 (c) 所示. (a)β= 118° (b)β= 67° (c)关节 3 伸长量 l 的误差 图 8 壁面凹过渡在线步态规划算法仿真结果 Fig18 Simulations of gait planning algorithm 图 9 所示为三维模拟环境中双足爬壁机器人壁 面凹过渡的步态规划仿真 ;图 10 所示为基于在线步 态规划的双足爬壁机器人壁面凹过渡实验 :利用 2 块铝板搭建凹交叉壁面实验环境 ,其夹角为 95°;机 器人总重量是 650 g ,移动关节 3 的伸缩范围是 l ∈ [140 mm ,220 mm] ,吸盘足提供的真空负压最大值 是 90 kPa ;实验过程中为弥补在线步态规划算法产 生的误差 ,采用了基于传感器的吸盘足姿态自调整 控制方法[6 ] . (a)β= 118° ·44 · 智 能 系 统 学 报 第 2 卷