正在加载图片...
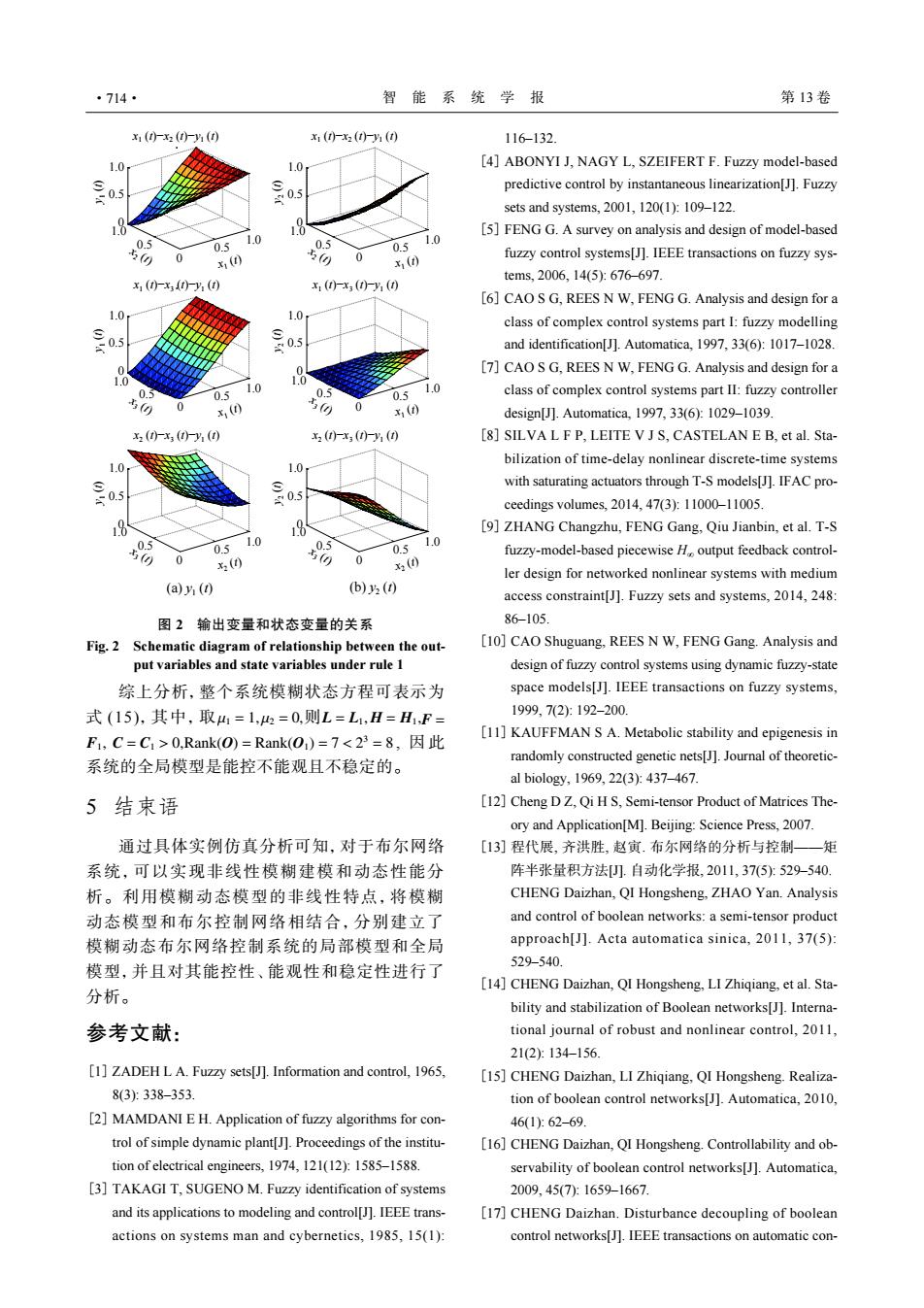
·714· 智能系统学报 第13卷 x1(-x2(-%( x(x2()-y(t) 116-132 1.0 1.0 [4]ABONYI J,NAGY L,SZEIFERT F.Fuzzy model-based 05 s 05 predictive control by instantaneous linearization[J].Fuzzy sets and systems.2001,120(1):109-122. 8 [5]FENG G.A survey on analysis and design of model-based 10 0.5 0.5 0.5 0.5 1.0 0 x1(0 0 x1(0 fuzzy control systems[J].IEEE transactions on fuzzy sys- tems.2006.14(5:676-697. x1()xy1) x1)-x3(-y1(0 [6]CAO S G,REES N W,FENG G.Analysis and design for a 1.0 class of complex control systems part I:fuzzy modelling 0.5 05 and identification[J].Automatica,1997,33(6):1017-1028. [7]CAOS G,REES N W,FENG G.Analysis and design for a 10 .0 05 0.5 1.0 0.5 0.5 1.0 class of complex control systems part II:fuzzy controller x1(0 30 1(0 design[J].Automatica,1997,33(6):1029-1039. x2()-x3(t-y1() x2(-x,()-y1() [8]SILVA L F P,LEITE V JS,CASTELAN E B,et al.Sta- bilization of time-delay nonlinear discrete-time systems 1.0 1.0 with saturating actuators through T-S models[J].IFAC pro- 05 05 ceedings volumes,.2014,473):11000-11005. [9]ZHANG Changzhu,FENG Gang,Qiu Jianbin,et al.T-S 0.5 0.5 1.0 1.0 0.5 fuzzy-model-based piecewise A,output feedback control- () 0 3(0 ler design for networked nonlinear systems with medium (a( (b)() access constraint[J].Fuzzy sets and systems,2014,248: 图2输出变量和状态变量的关系 86-105 Fig.2 Schematic diagram of relationship between the out [10]CAO Shuguang,REES N W,FENG Gang.Analysis and put variables and state variables under rule 1 design of fuzzy control systems using dynamic fuzzy-state 综上分析,整个系统模糊状态方程可表示为 space models[J].IEEE transactions on fuzzy systems, 式(15),其中,取山1=1,=0,则L=L1,H=H1,F= 1999,72:192-200. F1,C=C1>0,Rank(O)=Rank(O1)=7<23=8,因此 [11]KAUFFMAN S A.Metabolic stability and epigenesis in 系统的全局模型是能控不能观且不稳定的。 randomly constructed genetic nets[].Journal of theoretic- al biology,1969,22(3):437-467. 5结束语 [12]Cheng DZ,Qi HS,Semi-tensor Product of Matrices The- ory and Application[M].Beijing:Science Press,2007. 通过具体实例仿真分析可知,对于布尔网络 [13]程代展,齐洪胜,赵寅.布尔网络的分析与控制一矩 系统,可以实现非线性模糊建模和动态性能分 阵半张量积方法U.自动化学报,2011,37(5):529-540. 析。利用模糊动态模型的非线性特点,将模糊 CHENG Daizhan,QI Hongsheng,ZHAO Yan.Analysis 动态模型和布尔控制网络相结合,分别建立了 and control of boolean networks:a semi-tensor product 模糊动态布尔网络控制系统的局部模型和全局 approach[J].Acta automatica sinica,2011,37(5): 529-540. 模型,并且对其能控性、能观性和稳定性进行了 分析。 [14]CHENG Daizhan,QI Hongsheng,LI Zhiqiang,et al.Sta- bility and stabilization of Boolean networks[J].Interna- 参考文献: tional journal of robust and nonlinear control,2011, 21(2)134156 [1]ZADEH LA.Fuzzy sets[J].Information and control,1965, [15]CHENG Daizhan,LI Zhiqiang,QI Hongsheng.Realiza- 8(3):338-353 tion of boolean control networks[J].Automatica,2010. [2]MAMDANI E H.Application of fuzzy algorithms for con- 46(162-69. trol of simple dynamic plant[J].Proceedings of the institu- [16]CHENG Daizhan,QI Hongsheng.Controllability and ob- tion of electrical engineers,1974,121(12):1585-1588. servability of boolean control networks[J].Automatica. [3]TAKAGI T,SUGENO M.Fuzzy identification of systems 2009,45(7):1659-1667. and its applications to modeling and control[J].IEEE trans- [17]CHENG Daizhan.Disturbance decoupling of boolean actions on systems man and cybernetics,1985,15(1): control networks[J].IEEE transactions on automatic con-µ1 = 1, µ2 = 0, L = L1, H = H1,F = F1, C = C1 > 0,Rank(O) = Rank(O1) = 7 < 2 3 = 8 综上分析,整个系统模糊状态方程可表示为 式 (15),其中,取 则 , 因 此 系统的全局模型是能控不能观且不稳定的。 5 结束语 通过具体实例仿真分析可知,对于布尔网络 系统,可以实现非线性模糊建模和动态性能分 析。利用模糊动态模型的非线性特点,将模糊 动态模型和布尔控制网络相结合,分别建立了 模糊动态布尔网络控制系统的局部模型和全局 模型,并且对其能控性、能观性和稳定性进行了 分析。 参考文献: ZADEH L A. Fuzzy sets[J]. Information and control, 1965, 8(3): 338–353. [1] MAMDANI E H. Application of fuzzy algorithms for control of simple dynamic plant[J]. Proceedings of the institution of electrical engineers, 1974, 121(12): 1585–1588. [2] TAKAGI T, SUGENO M. Fuzzy identification of systems and its applications to modeling and control[J]. IEEE transactions on systems man and cybernetics, 1985, 15(1): [3] 116–132. ABONYI J, NAGY L, SZEIFERT F. Fuzzy model-based predictive control by instantaneous linearization[J]. Fuzzy sets and systems, 2001, 120(1): 109–122. [4] FENG G. A survey on analysis and design of model-based fuzzy control systems[J]. IEEE transactions on fuzzy systems, 2006, 14(5): 676–697. [5] CAO S G, REES N W, FENG G. Analysis and design for a class of complex control systems part I: fuzzy modelling and identification[J]. Automatica, 1997, 33(6): 1017–1028. [6] CAO S G, REES N W, FENG G. Analysis and design for a class of complex control systems part II: fuzzy controller design[J]. Automatica, 1997, 33(6): 1029–1039. [7] SILVA L F P, LEITE V J S, CASTELAN E B, et al. Stabilization of time-delay nonlinear discrete-time systems with saturating actuators through T-S models[J]. IFAC proceedings volumes, 2014, 47(3): 11000–11005. [8] ZHANG Changzhu, FENG Gang, Qiu Jianbin, et al. T-S fuzzy-model-based piecewise H∞ output feedback controller design for networked nonlinear systems with medium access constraint[J]. Fuzzy sets and systems, 2014, 248: 86–105. [9] CAO Shuguang, REES N W, FENG Gang. Analysis and design of fuzzy control systems using dynamic fuzzy-state space models[J]. IEEE transactions on fuzzy systems, 1999, 7(2): 192–200. [10] KAUFFMAN S A. Metabolic stability and epigenesis in randomly constructed genetic nets[J]. Journal of theoretical biology, 1969, 22(3): 437–467. [11] Cheng D Z, Qi H S, Semi-tensor Product of Matrices Theory and Application[M]. Beijing: Science Press, 2007. [12] 程代展, 齐洪胜, 赵寅. 布尔网络的分析与控制——矩 阵半张量积方法[J]. 自动化学报, 2011, 37(5): 529–540. CHENG Daizhan, QI Hongsheng, ZHAO Yan. Analysis and control of boolean networks: a semi-tensor product approach[J]. Acta automatica sinica, 2011, 37(5): 529–540. [13] CHENG Daizhan, QI Hongsheng, LI Zhiqiang, et al. Stability and stabilization of Boolean networks[J]. International journal of robust and nonlinear control, 2011, 21(2): 134–156. [14] CHENG Daizhan, LI Zhiqiang, QI Hongsheng. Realization of boolean control networks[J]. Automatica, 2010, 46(1): 62–69. [15] CHENG Daizhan, QI Hongsheng. Controllability and observability of boolean control networks[J]. Automatica, 2009, 45(7): 1659–1667. [16] CHENG Daizhan. Disturbance decoupling of boolean control networks[J]. IEEE transactions on automatic con- [17] 0.5 1.0 0 0.5 1.0 0 0.5 1.0 x1 (t) x2 (t) y1 (t) 0.5 1.0 0 0.5 1.0 0 0.5 1.0 x1 (t) x3 (t) y1 (t) 0.5 1.0 0 0.5 1.0 0 0.5 1.0 x1 (t) x2 (t) y2 (t) 0.5 1.0 0 0.5 1.0 0 0.5 1.0 x1 (t) x3 (t) y2 (t) (a) y1 (t) (b) y2 (t) 0.5 1.0 0 0.5 1.0 0 0.5 1.0 x2 (t) x3 (t) y1 (t) 0.5 1.0 0 0.5 1.00 0.5 1.0 x2 (t) x3 (t) y2 (t) x1 (t)−x2 (t)−y1 (t) x1 (t)−x2 (t)−y1 (t) x1 (t)−x3 (t)−y1 (t) x1 (t)−x3 (t)−y1 (t) x2 (t)−x3 (t)−y1 (t) x2 (t)−x3 (t)−y1 (t) 图 2 输出变量和状态变量的关系 Fig. 2 Schematic diagram of relationship between the output variables and state variables under rule 1 ·714· 智 能 系 统 学 报 第 13 卷