正在加载图片...
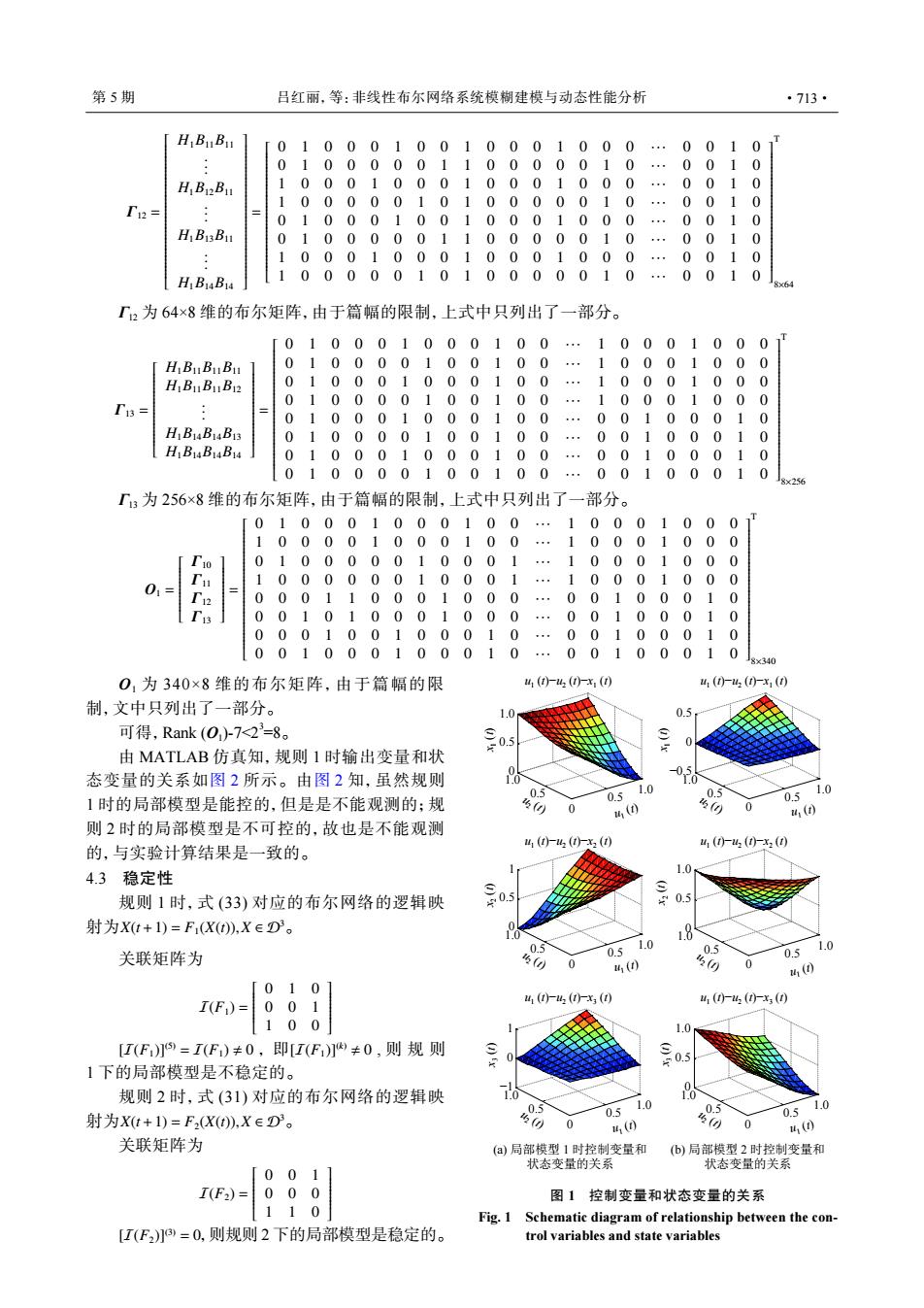
第5期 吕红丽,等:非线性布尔网络系统模糊建模与动态性能分析 ·713 H,BnBn 0 100010010001000.0010 0100000110000010.0010 H,B12Bu 1 000100010001000 0010 1000001010000010.0010 T12= 0100010010001000 001 0 H1B13B11 01 00000110000010 00 1 1000100010001000. 0010 H1B14B14 1 000001010000010.. 0010 864 「2为64×8维的布尔矩阵,由于篇幅的限制,上式中只列出了一部分。 010001000100.10001000 HBuBuBn 010000100100 ·10001000 H1B11B11B12 010001000100…10001000 010000100100.10001000 = 0 10001000100.00100 010 H1B14B14B13 0 10000100100·0010001 H1B14B14B14 0 10001000100 001000 10 010000100100 .00100010 8×256 厂:为256×8维的布尔矩阵,由于篇幅的限制,上式中只列出了一部分。 010001000100.10001000 100001000100.10001000 T10 010000010001.10001000 100000010001·10001000 01= 000110001000. 0010001 0 001010001000.00100010 000100100010 00100010 001000100010· 00100010 8×340 0,为340×8维的布尔矩阵,由于篇幅的限 4(t-4(-x() (42(x1() 制,文中只列出了一部分。 10 0.5 可得,Rank(O)7<2=8。 05 由MATLAB仿真知,规则1时输出变量和状 05 态变量的关系如图2所示。由图2知,虽然规则 10 0 0.5 1.0 0.5 1.0 1时的局部模型是能控的,但是是不能观测的:规 0.5 0.5 0 4(0 0 4(0 则2时的局部模型是不可控的,故也是不能观测 1(42(x2(t) 41(43(-x2() 的,与实验计算结果是一致的。 4.3稳定性 1.0 规则1时,式(33)对应的布尔网络的逻辑映 0.5 射为Xt+1)=F(X(),X∈D3。 18 0. 1.0 0.5 关联矩阵为 () 0.5 0.5 1.0 0 4( 出(0 [010 I(F)= 1(42(x3() 0.0.1 4(小4(-x( 100 1.0 [I(F)]=I(F)≠0,即[(F)≠0,则规则 05 1下的局部模型是不稳定的。 0 规则2时,式(31)对应的布尔网络的逻辑映 1.0 1.0 。 1.0 1.0 射为Xt+1)=F,(Xt),X∈D。 0.5 4(0 。 0.5 41(0 关联矩阵为 (a)局部模型1时控制变量和 (b)局部模型2时控制变量和 状态变量的关系 状态变量的关系 00 1 I(F2)= 0.0 0 图1控制变量和状态变量的关系 110 Fig.1 Schematic diagram of relationship between the con- [I(F2)=0,则规则2下的局部模型是稳定的。 trol variables and state variablesΓ12 = H1B11B11 . . . H1B12B11 . . . H1B13B11 . . . H1B14B14 = 0 1 0 0 0 1 0 0 1 0 0 0 1 0 0 0 ··· 0 0 1 0 0 1 0 0 0 0 0 1 1 0 0 0 0 0 1 0 ··· 0 0 1 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 ··· 0 0 1 0 1 0 0 0 0 0 1 0 1 0 0 0 0 0 1 0 ··· 0 0 1 0 0 1 0 0 0 1 0 0 1 0 0 0 1 0 0 0 ··· 0 0 1 0 0 1 0 0 0 0 0 1 1 0 0 0 0 0 1 0 ··· 0 0 1 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 ··· 0 0 1 0 1 0 0 0 0 0 1 0 1 0 0 0 0 0 1 0 ··· 0 0 1 0 T 8×64 Γ12 为 64×8 维的布尔矩阵,由于篇幅的限制,上式中只列出了一部分。 Γ13 = H1B11B11B11 H1B11B11B12 . . . H1B14B14B13 H1B14B14B14 = 0 1 0 0 0 1 0 0 0 1 0 0 ··· 1 0 0 0 1 0 0 0 0 1 0 0 0 0 1 0 0 1 0 0 ··· 1 0 0 0 1 0 0 0 0 1 0 0 0 1 0 0 0 1 0 0 ··· 1 0 0 0 1 0 0 0 0 1 0 0 0 0 1 0 0 1 0 0 ··· 1 0 0 0 1 0 0 0 0 1 0 0 0 1 0 0 0 1 0 0 ··· 0 0 1 0 0 0 1 0 0 1 0 0 0 0 1 0 0 1 0 0 ··· 0 0 1 0 0 0 1 0 0 1 0 0 0 1 0 0 0 1 0 0 ··· 0 0 1 0 0 0 1 0 0 1 0 0 0 0 1 0 0 1 0 0 ··· 0 0 1 0 0 0 1 0 T 8×256 Γ13 为 256×8 维的布尔矩阵,由于篇幅的限制,上式中只列出了一部分。 O1 = Γ10 Γ11 Γ12 Γ13 = 0 1 0 0 0 1 0 0 0 1 0 0 ··· 1 0 0 0 1 0 0 0 1 0 0 0 0 1 0 0 0 1 0 0 ··· 1 0 0 0 1 0 0 0 0 1 0 0 0 0 0 1 0 0 0 1 ··· 1 0 0 0 1 0 0 0 1 0 0 0 0 0 0 1 0 0 0 1 ··· 1 0 0 0 1 0 0 0 0 0 0 1 1 0 0 0 1 0 0 0 ··· 0 0 1 0 0 0 1 0 0 0 1 0 1 0 0 0 1 0 0 0 ··· 0 0 1 0 0 0 1 0 0 0 0 1 0 0 1 0 0 0 1 0 ··· 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 ··· 0 0 1 0 0 0 1 0 T 8×340 O1 为 340×8 维的布尔矩阵,由于篇幅的限 制,文中只列出了一部分。 可得,Rank (O1 )-7<23 =8。 由 MATLAB 仿真知,规则 1 时输出变量和状 态变量的关系如图 2 所示。由图 2 知,虽然规则 1 时的局部模型是能控的,但是是不能观测的;规 则 2 时的局部模型是不可控的,故也是不能观测 的,与实验计算结果是一致的。 4.3 稳定性 X(t+1) = F1(X(t)),X ∈ D3 规则 1 时,式 (33) 对应的布尔网络的逻辑映 射为 。 关联矩阵为 I(F1) = 0 1 0 0 0 1 1 0 0 [I(F1)](5) = I(F1) , 0 [I(F1)](k) , 即 , 0 , 则 规 则 1 下的局部模型是不稳定的。 X(t+1) = F2(X(t)),X ∈ D3 规则 2 时,式 (31) 对应的布尔网络的逻辑映 射为 。 关联矩阵为 I(F2) = 0 0 1 0 0 0 1 1 0 [I(F2)](3) = 0 ,则规则 2 下的局部模型是稳定的。 (a) 局部模型 1 时控制变量和 状态变量的关系 (b) 局部模型 2 时控制变量和 状态变量的关系 0.5 1.0 0 0.5 1.0 0 0.5 1.0 u1 (t) u2 (t) x1 (t) 0.5 1.0 0 0.5 1.0 0 0.5 1 u1 (t) u2 (t) x2 (t) 0.5 1.0 0 0.5 1.0 −1 0 1 u1 (t) u2 (t) x3 (t) 0.5 1.0 0 0.5 1.0 −0.5 0 0.5 u1 (t) u2 (t) x1 (t) 0.5 1.0 0 0.5 1.0 0 0.5 1.0 u1 (t) u2 (t) x3 (t) 0.5 1.0 0 0.5 1.00 0.5 1.0 u1 (t) u2 (t) x2 (t) u1 (t)−u2 (t)−x1 (t) u1 (t)−u2 (t)−x1 (t) u1 (t)−u2 (t)−x2 (t) u1 (t)−u2 (t)−x2 (t) u1 (t)−u2 (t)−x3 (t) u1 (t)−u2 (t)−x3 (t) 图 1 控制变量和状态变量的关系 Fig. 1 Schematic diagram of relationship between the control variables and state variables 第 5 期 吕红丽,等:非线性布尔网络系统模糊建模与动态性能分析 ·713·