正在加载图片...
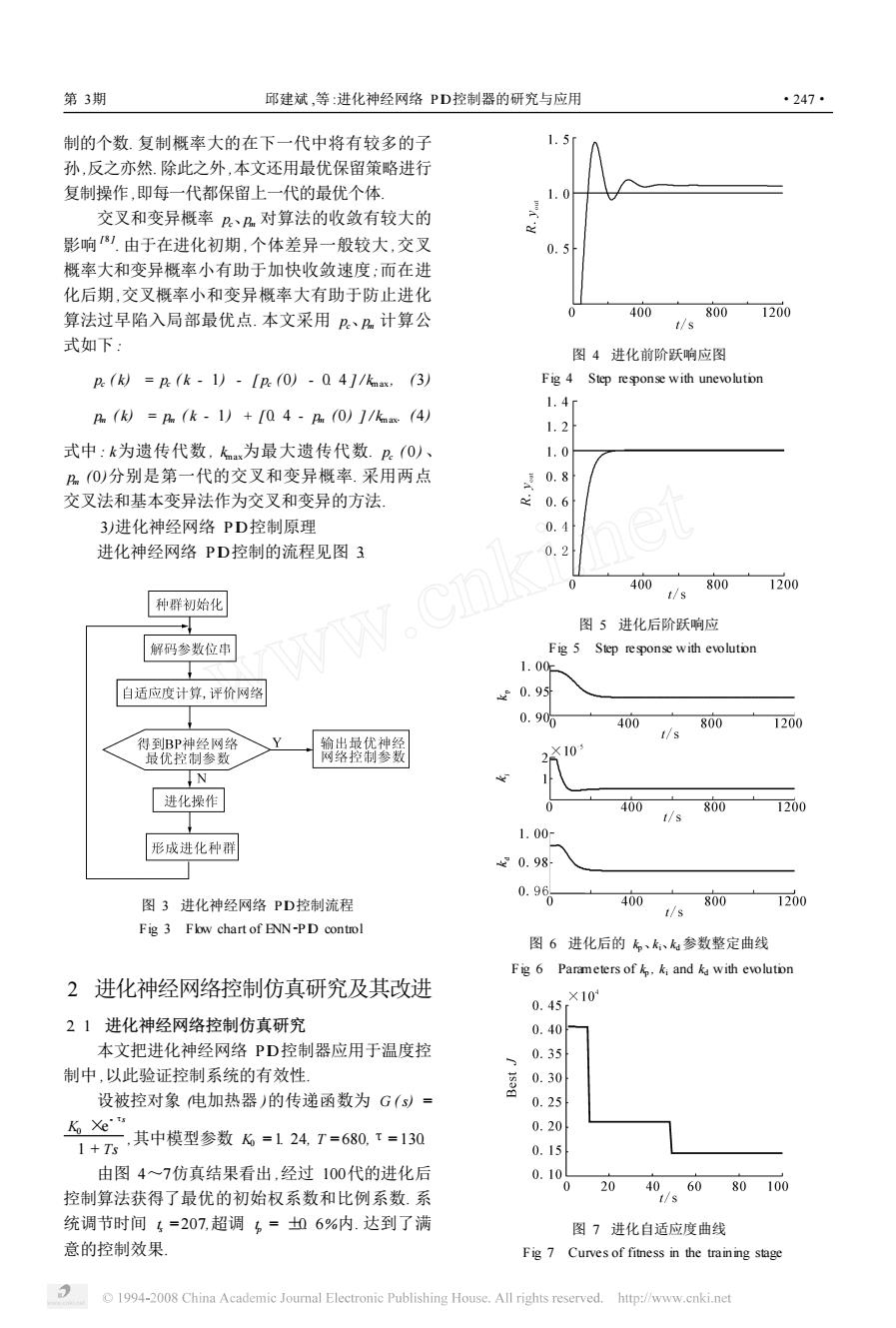
第3期 邱建斌,等:进化神经网络PD控制器的研究与应用 ·247 制的个数.复制概率大的在下一代中将有较多的子 5 孙,反之亦然.除此之外,本文还用最优保留策略进行 复制操作,即每一代都保留上一代的最优个体 1.0 交叉和变异概率2、2对算法的收敛有较大的 影响由于在进化初期,个体差异一般较大,交叉 概率大和变异概率小有助于加快收敛速度:而在进 化后期,交叉概率小和变异概率大有助于防止进化 算法过早陷入局部最优点.本文采用P、2计算公 400 8001200 t/s 式如下: 图4进化前阶跃响应图 A(k/=A(k-1)-[R0)-041/kx,3) Fig 4 Step response with unevolution 1.4r h(k)=A(k-1)+I04-A0)1/k(4) 1.2 式中:k为遗传代数,飞为最大遗传代数.2(0、 1.0 A0分别是第一代的交叉和变异概率.采用两点 30.8 交叉法和基本变异法作为交叉和变异的方法 0.6 3)进化神经网络PD控制原理 0.4 进化神经网络PD控制的流程见图3 0.2 400 800 1200 t/s 种群初始化 图5进化后阶跃响应 解码参数位串 Fig 5 Step response with evolution 1.00 自适应度计算,评价网络 ✉0.95 0.906 400 800 1200 t/s 得到BP神经网铭 输出最优神经 ,×10 最优控制参数 网络控制参数 N 进化操作 400 800 1200 t/s 1.00 形成进化种群 0.98 图3进化神经网络PD控制流程 0.9 400 800 1200 t/s Fig 3 Flw chart of ENN-PD control 图6进化后的斥、k、k参数整定曲线 Fig 6 Parameters of.ki and ka with evolution 2进化神经网络控制仿真研究及其改进 10 0.45r 21进化神经网络控制仿真研究 0.40 本文把进化神经网络PD控制器应用于温度控 0.35 制中,以此验证控制系统的有效性」 设被控对象电加热器)的传递函数为G(s= 030 0.25 Ko Xets 1+万其中模型参数飞=124T=680,【=130 0.20 0.15 由图4~7仿真结果看出,经过100代的进化后 0.10 0 20406080100 控制算法获得了最优的初始权系数和比例系数.系 t/s 统调节时间4=207,超调5=山6%内.达到了满 图7进化自适应度曲线 意的控制效果 Fig 7 Curves of fitness in the training stage 1994-2008 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.net制的个数. 复制概率大的在下一代中将有较多的子 孙,反之亦然. 除此之外,本文还用最优保留策略进行 复制操作,即每一代都保留上一代的最优个体. 交叉和变异概率 pc、pm 对算法的收敛有较大的 影响 [ 8 ] . 由于在进化初期 ,个体差异一般较大 ,交叉 概率大和变异概率小有助于加快收敛速度;而在进 化后期 ,交叉概率小和变异概率大有助于防止进化 算法过早陷入局部最优点. 本文采用 pc、pm 计算公 式如下 : pc ( k) = pc ( k - 1) - [ pc (0) - 0. 4 ] / kmax , (3) pm ( k) = pm ( k - 1) + [0. 4 - pm (0) ] / kmax . (4) 式中 : k为遗传代数 , kmax为最大遗传代数. pc ( 0 ) 、 pm (0)分别是第一代的交叉和变异概率. 采用两点 交叉法和基本变异法作为交叉和变异的方法. 3)进化神经网络 PID控制原理 进化神经网络 PID控制的流程见图 3. 图 3 进化神经网络 P ID控制流程 Fig. 3 Flow chart of ENN2P ID control 2 进化神经网络控制仿真研究及其改进 2. 1 进化神经网络控制仿真研究 本文把进化神经网络 PID控制器应用于温度控 制中 ,以此验证控制系统的有效性. 设被控对象 (电加热器 )的传递函数为 G ( s) = K0 ×e -τs 1 + Ts ,其中模型参数 K0 = 1. 24, T = 680,τ= 130. 由图 4~7仿真结果看出 ,经过 100代的进化后 控制算法获得了最优的初始权系数和比例系数. 系 统调节时间 ts = 207,超调 tp = ±0. 6%内. 达到了满 意的控制效果. 图 4 进化前阶跃响应图 Fig. 4 Step response with unevolution 图 5 进化后阶跃响应 Fig. 5 Step response with evolution 图 6 进化后的 kp、ki、kd 参数整定曲线 Fig. 6 Parameters of kp , ki and kd with evolution 图 7 进化自适应度曲线 Fig. 7 Curves of fitness in the training stage 第 3期 邱建斌 ,等 :进化神经网络 P ID控制器的研究与应用 · 742 ·