正在加载图片...
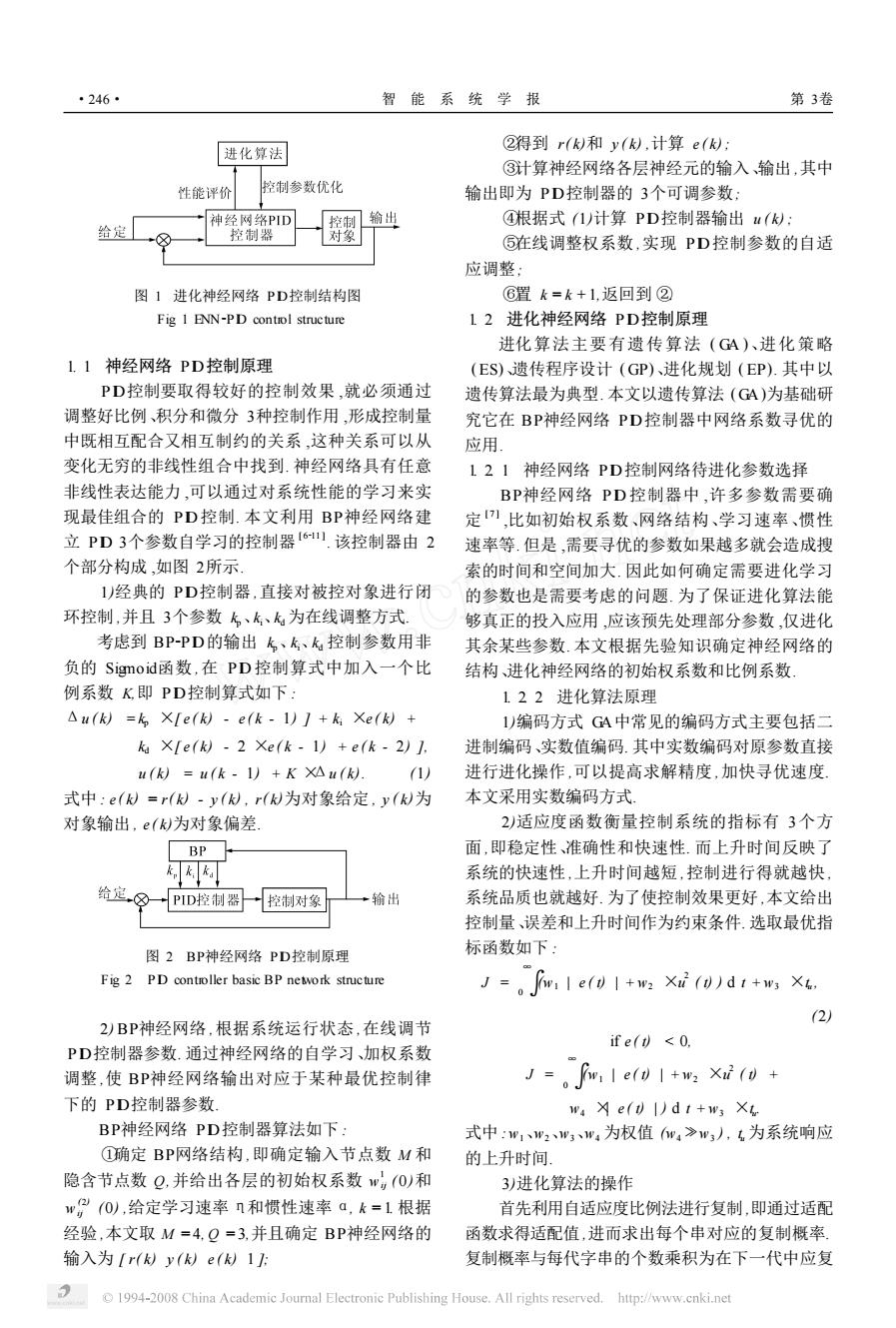
·246· 智能系统学报 第3卷 进化算法 ②得到r(和y(,计算e(k); ③计算神经网络各层神经元的输入输出,其中 性能评价 控制参数优化 输出即为PD控制器的3个可调参数: 神经网络PID ④根据式1)计算PD控制器输出u(): 给定 控制输出 控制器 对象 ⑤在线调整权系数,实现PD控制参数的自适 应调整: 图1进化神经网络PD控制结构图 ⑥置k=k+1,返回到② Fig 1 ENN-PD control structure 12进化神经网络PD控制原理 进化算法主要有遗传算法(GA)、进化策略 L1神经网络PD控制原理 (ES)遗传程序设计(GP)、进化规划(EP).其中以 PD控制要取得较好的控制效果,就必须通过 遗传算法最为典型.本文以遗传算法(GA)为基础研 调整好比例、积分和微分3种控制作用,形成控制量 究它在BP神经网络PD控制器中网络系数寻优的 中既相互配合又相互制约的关系,这种关系可以从 应用 变化无穷的非线性组合中找到.神经网络具有任意 L21神经网络PD控制网络待进化参数选择 非线性表达能力,可以通过对系统性能的学习来实 BP神经网络PD控制器中,许多参数需要确 现最佳组合的PD控制.本文利用BP神经网络建 定,比如初始权系数、网络结构、学习速率、惯性 立PD3个参数自学习的控制器6.该控制器由2 速率等.但是,需要寻优的参数如果越多就会造成搜 个部分构成,如图2所示. 索的时间和空间加大.因此如何确定需要进化学习 1)经典的PD控制器,直接对被控对象进行闭。 的参数也是需要考虑的问题.为了保证进化算法能 环控制,并且3个参数k、k、k为在线调整方式 够真正的投入应用,应该预先处理部分参数,仅进化 考虑到BP-PD的输出k、k、k控制参数用非 其余某些参数.本文根据先验知识确定神经网络的 负的Sigoid函数,在PD控制算式中加入一个比 结构、进化神经网络的初始权系数和比例系数 例系数K即PD控制算式如下: 122进化算法原理 Au(k)=k X[e(k)-e(k-1)]+k Xe(k)+ 1)编码方式GA中常见的编码方式主要包括二 k×[ek)-2Xek-1)+ek-2)], 进制编码、实数值编码.其中实数编码对原参数直接 u(k)=u(k-1)+KX④u(. (1) 进行进化操作,可以提高求解精度,加快寻优速度. 式中:e(d=r(-y(,r(为对象给定,y(k)为 本文采用实数编码方式 对象输出,e(为对象偏差 2适应度函数衡量控制系统的指标有3个方 BP 面,即稳定性、准确性和快速性.而上升时间反映了 系统的快速性,上升时间越短,控制进行得就越快 给定☒ PID控制器 控制对象 ,输出 系统品质也就越好.为了使控制效果更好,本文给出 控制量、误差和上升时间作为约束条件.选取最优指 图2BP神经网络PD控制原理 标函数如下: Fig 2 PD controller basic BP netork structure Jfle(0 1+w2 xi(0)dt+ws xt. (2) 2)BP神经网络,根据系统运行状态,在线调节 if e(t)<0. PD控制器参数.通过神经网络的自学习、加权系数 调整,使BP神经网络输出对应于某种最优控制律 J=。Jm,1e(w1+wx0+ 下的PD控制器参数 wa x e(v dt+w;Xi BP神经网络PD控制器算法如下。 式中:w1、w2、w3、w,为权值w4≥w3),1为系统响应 ①确定BP网络结构,即确定输入节点数M和 的上升时间. 隐含节点数Q,并给出各层的初始权系数",0)和 3)进化算法的操作 w20,给定学习速率n和惯性速率a,k=1根据 首先利用自适应度比例法进行复制,即通过适配 经验,本文取M=4,Q=3,并且确定BP神经网络的 函数求得适配值,进而求出每个串对应的复制概率. 输入为[r(y()e()1月 复制概率与每代字串的个数乘积为在下一代中应复 1994-2008 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.net图 1 进化神经网络 P ID控制结构图 Fig. 1 ENN2P ID control structure 1. 1 神经网络 PID控制原理 PID控制要取得较好的控制效果 ,就必须通过 调整好比例、积分和微分 3种控制作用 ,形成控制量 中既相互配合又相互制约的关系 ,这种关系可以从 变化无穷的非线性组合中找到. 神经网络具有任意 非线性表达能力 ,可以通过对系统性能的学习来实 现最佳组合的 PID 控制. 本文利用 BP神经网络建 立 PID 3个参数自学习的控制器 [ 6211 ] . 该控制器由 2 个部分构成 ,如图 2所示. 1)经典的 PID控制器 ,直接对被控对象进行闭 环控制 ,并且 3个参数 kp、ki、kd 为在线调整方式. 考虑到 BP2PID的输出 kp、ki、kd 控制参数用非 负的 Sigmoid函数 ,在 PID 控制算式中加入一个比 例系数 K,即 PID控制算式如下 : Δu ( k) =kp ×[ e ( k) - e ( k - 1) ] + ki ×e ( k) + kd ×[ e ( k) - 2 ×e ( k - 1) + e ( k - 2) ], u ( k) = u ( k - 1) + K ×Δu ( k). (1) 式中 : e ( k) = r( k) - y ( k) , r( k)为对象给定 , y ( k)为 对象输出 , e ( k)为对象偏差. 图 2 BP神经网络 P ID控制原理 Fig. 2 P ID controller basic BP network structure 2) BP神经网络 ,根据系统运行状态 ,在线调节 PID控制器参数. 通过神经网络的自学习、加权系数 调整 ,使 BP神经网络输出对应于某种最优控制律 下的 PID控制器参数. BP神经网络 PID控制器算法如下 : ①确定 BP网络结构 ,即确定输入节点数 M 和 隐含节点数 Q,并给出各层的初始权系数 w 1 ij ( 0)和 w (2) ij (0) ,给定学习速率 η和惯性速率 α, k = 1. 根据 经验 ,本文取 M = 4, Q = 3,并且确定 BP神经网络的 输入为 [ r( k) y ( k) e ( k) 1 ]; ②得到 r( k)和 y ( k) ,计算 e ( k) ; ③计算神经网络各层神经元的输入、输出 ,其中 输出即为 PID控制器的 3个可调参数; ④根据式 (1)计算 PID控制器输出 u ( k) ; ⑤在线调整权系数 ,实现 PID控制参数的自适 应调整; ⑥置 k = k + 1,返回到 ②. 1. 2 进化神经网络 PID控制原理 进化算法主要有遗传算法 ( GA )、进化策略 (ES)、遗传程序设计 ( GP)、进化规划 ( EP). 其中以 遗传算法最为典型. 本文以遗传算法 ( GA)为基础研 究它在 BP神经网络 PID控制器中网络系数寻优的 应用. 1. 2. 1 神经网络 PID控制网络待进化参数选择 BP神经网络 PID 控制器中 ,许多参数需要确 定 [ 7 ] ,比如初始权系数、网络结构、学习速率、惯性 速率等. 但是 ,需要寻优的参数如果越多就会造成搜 索的时间和空间加大. 因此如何确定需要进化学习 的参数也是需要考虑的问题. 为了保证进化算法能 够真正的投入应用 ,应该预先处理部分参数 ,仅进化 其余某些参数. 本文根据先验知识确定神经网络的 结构、进化神经网络的初始权系数和比例系数. 1. 2. 2 进化算法原理 1)编码方式 GA中常见的编码方式主要包括二 进制编码、实数值编码. 其中实数编码对原参数直接 进行进化操作 ,可以提高求解精度 ,加快寻优速度. 本文采用实数编码方式. 2)适应度函数衡量控制系统的指标有 3个方 面 ,即稳定性、准确性和快速性. 而上升时间反映了 系统的快速性 ,上升时间越短 ,控制进行得就越快 , 系统品质也就越好. 为了使控制效果更好 ,本文给出 控制量、误差和上升时间作为约束条件. 选取最优指 标函数如下 : J = ∫ ∞ 0 (w1 | e ( t) | +w2 ×u 2 ( t) ) d t +w3 ×tu , (2) if e ( t) < 0, J = ∫ ∞ 0 (w1 | e ( t) | +w2 ×u 2 ( t) + w4 ×| e ( t) | ) d t +w3 ×tu . 式中 :w1、w2、w3、w4 为权值 (w4 µ w3 ) , tu 为系统响应 的上升时间. 3)进化算法的操作 首先利用自适应度比例法进行复制,即通过适配 函数求得适配值 ,进而求出每个串对应的复制概率. 复制概率与每代字串的个数乘积为在下一代中应复 · 642 · 智 能 系 统 学 报 第 3卷