正在加载图片...
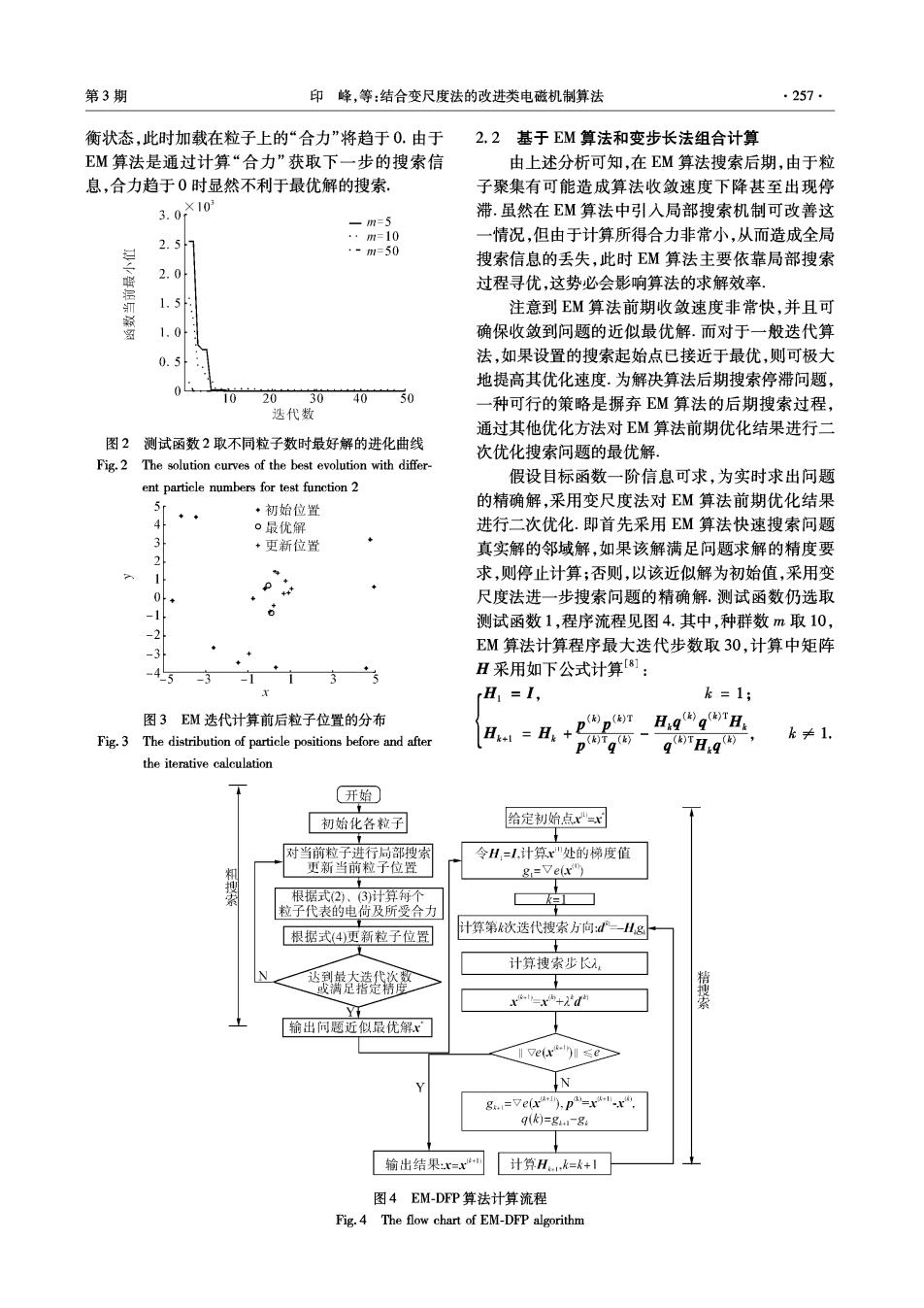
第3期 印峰,等:结合变尺度法的改进类电磁机制算法 257 衡状态,此时加载在粒子上的“合力”将趋于0.由于 2.2基于EM算法和变步长法组合计算 EM算法是通过计算“合力”获取下一步的搜索信 由上述分析可知,在EM算法搜索后期,由于粒 息,合力趋于0时显然不利于最优解的搜索。 子聚集有可能造成算法收敛速度下降甚至出现停 3.0X10 滞.虽然在EM算法中引入局部搜索机制可改善这 一m=5 一情况,但由于计算所得合力非常小,从而造成全局 2.5 ·m=10 ·-m=50 搜索信息的丢失,此时EM算法主要依靠局部搜索 2.0 过程寻优,这势必会影响算法的求解效率。 扫 1.5日 注意到EM算法前期收敛速度非常快,并且可 图 1.0 确保收敛到问题的近似最优解.而对于一般迭代算 0.5 法,如果设置的搜索起始点已接近于最优,则可极大 地提高其优化速度.为解决算法后期搜索停滞问题, 04 10 2030 40 50 种可行的策略是摒弃EM算法的后期搜索过程, 迭代数 通过其他优化方法对EM算法前期优化结果进行二 图2测试函数2取不同粒子数时最好解的进化曲线 次优化搜索问题的最优解. Fig.2 The solution curves of the best evolution with differ 假设目标函数一阶信息可求,为实时求出问题 ent particle numbers for test function 2 5r 的精确解,采用变尺度法对EM算法前期优化结果 ·初始位置 4 o最优解 进行二次优化.即首先采用EM算法快速搜索问题 3 +更新位置 真实解的邻域解,如果该解满足问题求解的精度要 1 求,则停止计算;否则,以该近似解为初始值,采用变 0+ p 尺度法进一步搜索问题的精确解.测试函数仍选取 11 测试函数1,程序流程见图4.其中,种群数m取10, -2 3 EM算法计算程序最大迭代步数取30,计算中矩阵 45 H采用如下公式计算[81: H1=I, k=1; 图3EM迭代计算前后粒子位置的分布 Fig.3 The distribution of particle positions before and after H.(pc qrHg,’ k≠1. the iterative calculation 开始 「初始化各粒子 给定初始点x=x 对当前粒子进行局部搜索 令H=L计算x”处的梯度值 更新当前粒子位置 g=Velx) 搜 根据式2)、3)计算每个 粒子代表的电荷及所受合力 根据式(4)更新粒子位置 计算第次送代搜索方向-山,g 计算搜索步长1 达到最大迭代次数 或满足指定精 xxd 精搜索 Y 输出问题近似最优解x I7exI≤e> N g=ve),p qK)=gk1-8& 输出结果:r=x 计算Hk=k+I 图4EM-DFP算法计算流程 Fig.4 The flow chart of EM-DFP algorithm