正在加载图片...
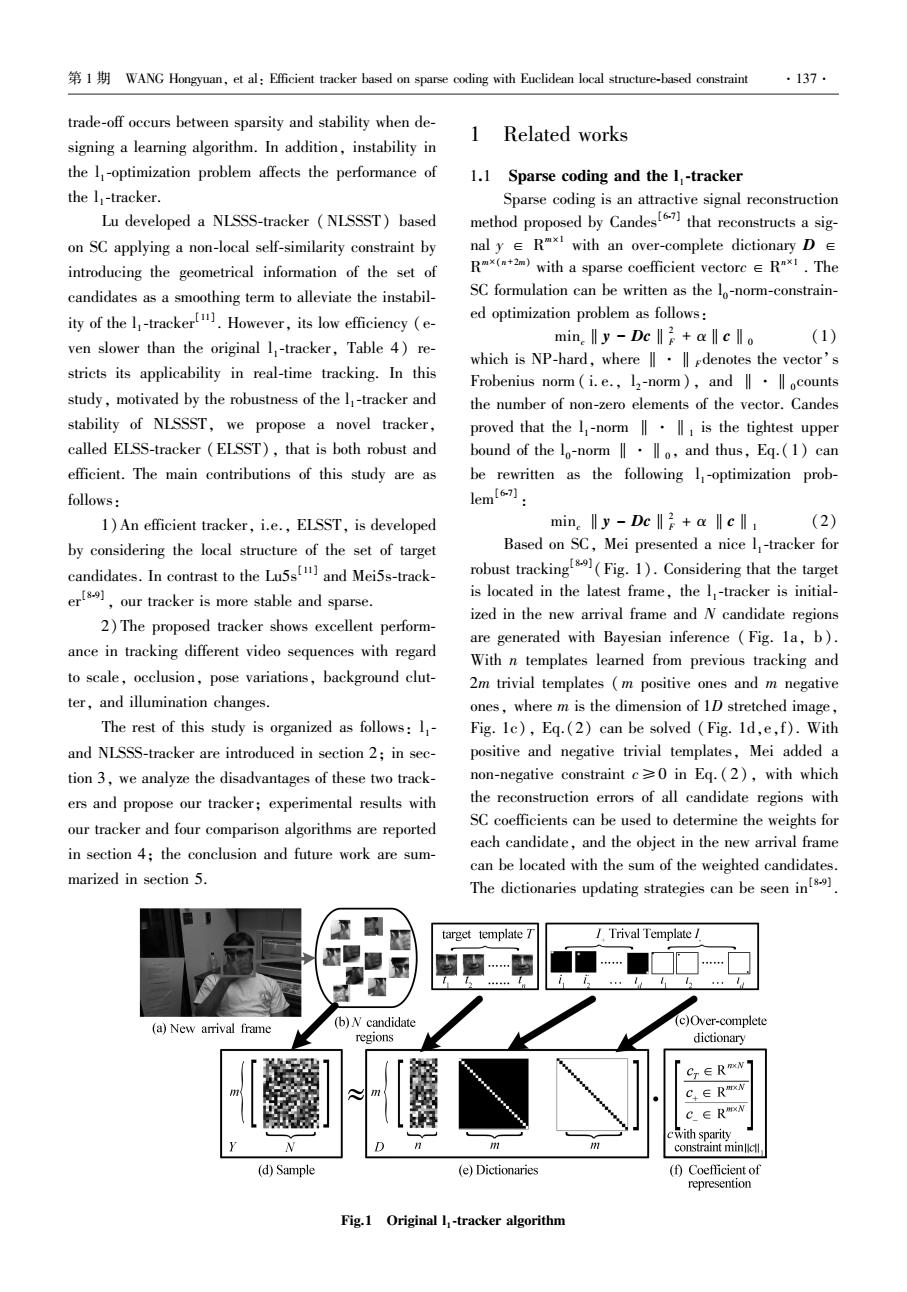
1 WANG Hongyuan,et al:Efficient tracker based on sparse coding with Euclidean local structure-based constraint ·137. trade-off occurs between sparsity and stability when de- 1 Related works signing a learning algorithm.In addition,instability in the I,-optimization problem affects the performance of 1.1 Sparse coding and the I,-tracker the 1-tracker. Sparse coding is an attractive signal reconstruction Lu developed a NLSSS-tracker NLSSST)based method proposed by Candes that reconstructs a sig- on SC applying a non-local self-similarity constraint by nal y R"x with an over-complete dictionary D introducing the geometrical information of the set of R)with a sparse coefficient vectoreR.The candidates as a smoothing term to alleviate the instabil- SC formulation can be written as the lo-norm-constrain- ity of the -tracker However,its low efficiency (e- ed optimization problem as follows: ven slower than the original l-tracker,Table 4)re- min,lly-Dcli+all cllo (1) which is NP-hard,where‖·‖edenotes the vector's stricts its applicability in real-time tracking.In this Frobenius norm(i.e.,l2-nom),and‖·‖locounts study,motivated by the robustness of the I-tracker and the number of non-zero elements of the vector.Candes stability of NISSST,we propose a novel tracker, proved that the I-norm Il is the tightest upper called ELSS-tracker (ELSST),that is both robust and bound of the lo-nom‖·Io,and thus,Eq.(1)can efficient.The main contributions of this study are as be rewritten as the following I-optimization prob- follows: lem[67]: 1)An efficient tracker,i.e.,ELSST,is developed min,lly-Dcl+a‖lcli (2) by considering the local structure of the set of target Based on SC,Mei presented a nice I-tracker for candidates.In contrast to the Lu5s and Mei5s-track- robust trackingFig.1).Considering that the target e our tracker is more stable and sparse. is located in the latest frame,the I-tracker is initial- ized in the new arrival frame and N candidate regions 2)The proposed tracker shows excellent perform- are generated with Bayesian inference (Fig.la,b). ance in tracking different video sequences with regard With n templates learned from previous tracking and to scale,occlusion,pose variations,background clut- 2m trivial templates (m positive ones and m negative ter,and illumination changes. ones,where m is the dimension of 1D stretched image, The rest of this study is organized as follows:I- Fig.Ic),Eq.(2)can be solved Fig.1d,e,f).With and NLSSS-tracker are introduced in section 2:in sec- positive and negative trivial templates,Mei added a tion 3,we analyze the disadvantages of these two track- non-negative constraint c0 in Eq.(2),with which ers and propose our tracker;experimental results with the reconstruction errors of all candidate regions with our tracker and four comparison algorithms are reported SC coefficients can be used to determine the weights for each candidate,and the object in the new arrival frame in section 4;the conclusion and future work are sum- can be located with the sum of the weighted candidates. marized in section 5. The dictionaries updating strategies can be seen in target template T Trival Template/ (a)New arrival frame (b)N candidate (c)Over-complete regions dictionary Cr∈RW1 C∈RW C∈RmN cwith sparity constraint minllcll (d)Sample (e)Dictionaries (f)Coefficient of represention Fig.1 Original I-tracker algorithmtrade⁃off occurs between sparsity and stability when de⁃ signing a learning algorithm. In addition, instability in the l 1 ⁃optimization problem affects the performance of the l 1 ⁃tracker. Lu developed a NLSSS⁃tracker (NLSSST) based on SC applying a non⁃local self⁃similarity constraint by introducing the geometrical information of the set of candidates as a smoothing term to alleviate the instabil⁃ ity of the l 1 ⁃tracker [11] . However, its low efficiency (e⁃ ven slower than the original l 1 ⁃tracker, Table 4) re⁃ stricts its applicability in real⁃time tracking. In this study, motivated by the robustness of the l 1 ⁃tracker and stability of NLSSST, we propose a novel tracker, called ELSS⁃tracker (ELSST), that is both robust and efficient. The main contributions of this study are as follows: 1)An efficient tracker, i.e., ELSST, is developed by considering the local structure of the set of target candidates. In contrast to the Lu5s [11] and Mei5s⁃track⁃ er [8⁃9] , our tracker is more stable and sparse. 2) The proposed tracker shows excellent perform⁃ ance in tracking different video sequences with regard to scale, occlusion, pose variations, background clut⁃ ter, and illumination changes. The rest of this study is organized as follows: l 1 ⁃ and NLSSS⁃tracker are introduced in section 2; in sec⁃ tion 3, we analyze the disadvantages of these two track⁃ ers and propose our tracker; experimental results with our tracker and four comparison algorithms are reported in section 4; the conclusion and future work are sum⁃ marized in section 5. 1 Related works 1.1 Sparse coding and the l 1 ⁃tracker Sparse coding is an attractive signal reconstruction method proposed by Candes [6⁃7] that reconstructs a sig⁃ nal y ∈ R m×1 with an over⁃complete dictionary D ∈ R m×(n+2m) with a sparse coefficient vectorc ∈ R n×1 . The SC formulation can be written as the l 0 ⁃norm⁃constrain⁃ ed optimization problem as follows: minc‖y - Dc‖2 F + α‖c‖0 (1) which is NP⁃hard, where ‖·‖F denotes the vector’s Frobenius norm ( i. e., l 2 ⁃norm), and ‖·‖0 counts the number of non⁃zero elements of the vector. Candes proved that the l 1 ⁃norm ‖·‖1 is the tightest upper bound of the l 0 ⁃norm ‖·‖0 , and thus, Eq.(1) can be rewritten as the following l 1 ⁃optimization prob⁃ lem [6⁃7] : minc ‖y - Dc‖2 F + α ‖c‖1 (2) Based on SC, Mei presented a nice l 1 ⁃tracker for robust tracking [8⁃9] (Fig. 1). Considering that the target is located in the latest frame, the l 1 ⁃tracker is initial⁃ ized in the new arrival frame and N candidate regions are generated with Bayesian inference ( Fig. 1a, b). With n templates learned from previous tracking and 2m trivial templates (m positive ones and m negative ones, where m is the dimension of 1D stretched image, Fig. 1c), Eq.(2) can be solved (Fig. 1d,e,f). With positive and negative trivial templates, Mei added a non⁃negative constraint c≥0 in Eq. (2), with which the reconstruction errors of all candidate regions with SC coefficients can be used to determine the weights for each candidate, and the object in the new arrival frame can be located with the sum of the weighted candidates. The dictionaries updating strategies can be seen in [8⁃9] . Fig.1 Original l 1 ⁃tracker algorithm 第 1 期 WANG Hongyuan, et al: Efficient tracker based on sparse coding with Euclidean local structure⁃based constraint ·137·