正在加载图片...
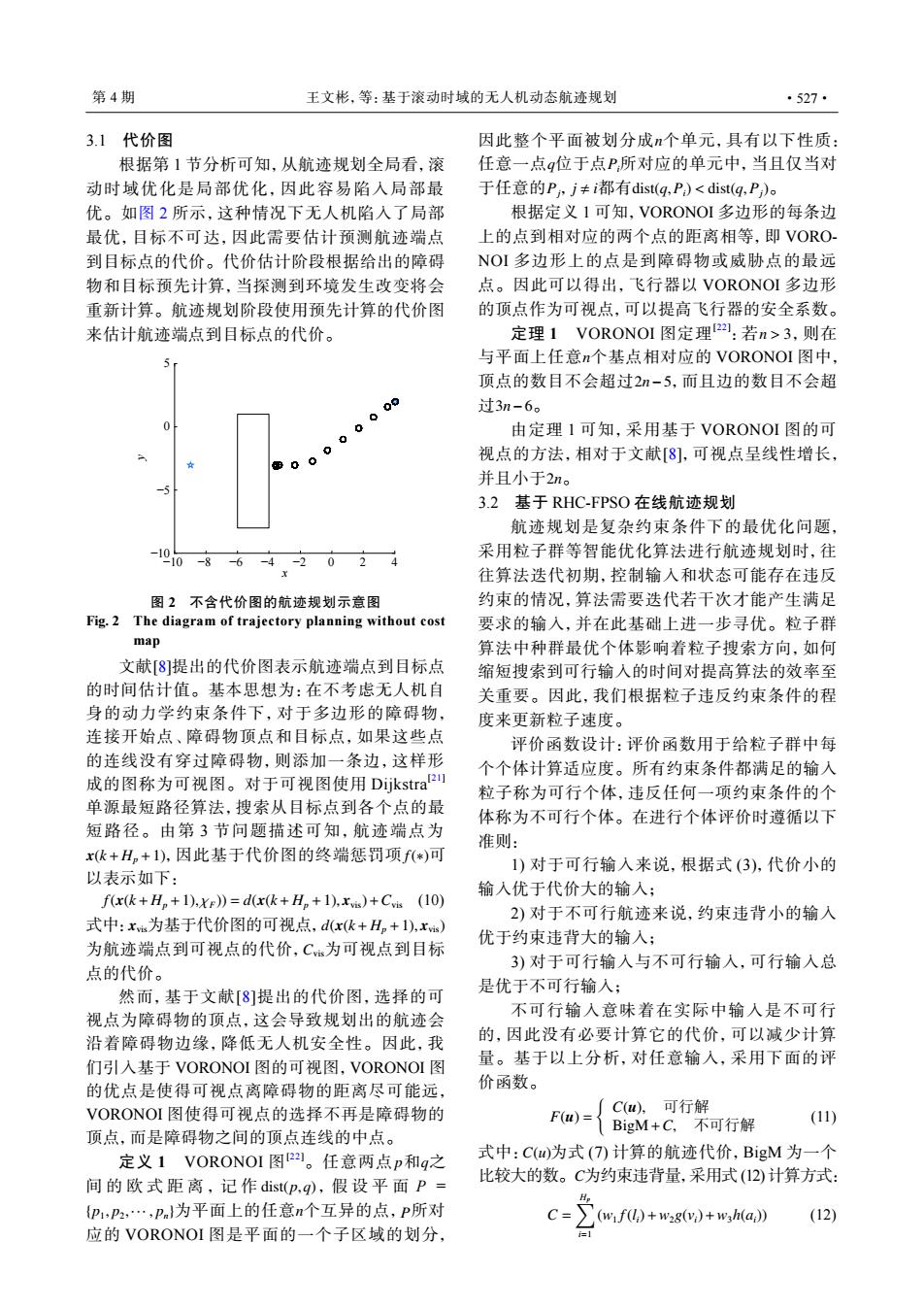
第4期 王文彬,等:基于滚动时域的无人机动态航迹规划 ·527· 3.1代价图 因此整个平面被划分成n个单元,具有以下性质: 根据第1节分析可知,从航迹规划全局看,滚 任意一点g位于点P所对应的单元中,当且仅当对 动时域优化是局部优化,因此容易陷入局部最 于任意的P,j≠都有dist(q,P)<dist(q,P)o 优。如图2所示,这种情况下无人机陷入了局部 根据定义1可知,VORONOI多边形的每条边 最优,目标不可达,因此需要估计预测航迹端点 上的点到相对应的两个点的距离相等,即VORO 到目标点的代价。代价估计阶段根据给出的障碍 NOI多边形上的点是到障碍物或威胁点的最远 物和目标预先计算,当探测到环境发生改变将会 点。因此可以得出,飞行器以VORONOI多边形 重新计算。航迹规划阶段使用预先计算的代价图 的顶点作为可视点,可以提高飞行器的安全系数。 来估计航迹端点到目标点的代价。 定理1 VORONOI图定理22:若n>3,则在 与平面上任意n个基点相对应的VORONOI图中, 顶点的数目不会超过2n-5,而且边的数目不会超 00 过3n-6。 0 由定理1可知,采用基于VORONOI图的可 视点的方法,相对于文献[8],可视点呈线性增长, 并且小于2n。 3.2基于RHC-FPSO在线航迹规划 航迹规划是复杂约束条件下的最优化问题, -1 采用粒子群等智能优化算法进行航迹规划时,往 10-8-6-4-2024 往算法迭代初期,控制输入和状态可能存在违反 图2不含代价图的航迹规划示意图 约束的情况,算法需要迭代若干次才能产生满足 Fig.2 The diagram of trajectory planning without cost 要求的输入,并在此基础上进一步寻优。粒子群 map 算法中种群最优个体影响着粒子搜索方向,如何 文献[8]提出的代价图表示航迹端点到目标点 缩短搜索到可行输入的时间对提高算法的效率至 的时间估计值。基本思想为:在不考虑无人机自 关重要。因此,我们根据粒子违反约束条件的程 身的动力学约束条件下,对于多边形的障碍物, 度来更新粒子速度。 连接开始点、障碍物顶点和目标点,如果这些点 评价函数设计:评价函数用于给粒子群中每 的连线没有穿过障碍物,则添加一条边,这样形 个个体计算适应度。所有约束条件都满足的输入 成的图称为可视图。对于可视图使用Dijkstra2山 粒子称为可行个体,违反任何一项约束条件的个 单源最短路径算法,搜索从目标点到各个点的最 体称为不可行个体。在进行个体评价时遵循以下 短路径。由第3节问题描述可知,航迹端点为 准则: x(k+H。+1),因此基于代价图的终端惩罚项f(*)可 1)对于可行输入来说,根据式(3),代价小的 以表示如下: 输入优于代价大的输人; f(x(++1).x))=d(x(k++1).xvis)+Cvis (10) 式中:x为基于代价图的可视点,dx(k+Hp+1),x) 2)对于不可行航迹来说,约束违背小的输入 为航迹端点到可视点的代价,C为可视点到目标 优于约束违背大的输入; 3)对于可行输人与不可行输人,可行输入总 点的代价。 是优于不可行输入: 然而,基于文献[8]提出的代价图,选择的可 视点为障碍物的顶点,这会导致规划出的航迹会 不可行输入意味着在实际中输入是不可行 沿着障碍物边缘,降低无人机安全性。因此,我 的,因此没有必要计算它的代价,可以减少计算 们引入基于VORONOI图的可视图,VORONOI图 量。基于以上分析,对任意输入,采用下面的评 的优点是使得可视点离障碍物的距离尽可能远: 价函数。 VORONOI图使得可视点的选择不再是障碍物的 C(u),可行解 F(u)= BigM+C,不可行解 (11) 顶点,而是障碍物之间的顶点连线的中点。 定义1 VORONOI图22。任意两点p和q之 式中:Cw为式(T)计算的航迹代价,BigM为一个 间的欧式距离,记作dist(p,q),假设平面P= 比较大的数。C为约束违背量,采用式(12)计算方式: {p1,P2,…,P为平面上的任意n个互异的点,P所对 C (wif()+w28(v:)+w3h(a)) (12) 应的VORONOI图是平面的一个子区域的划分,3.1 代价图 根据第 1 节分析可知,从航迹规划全局看,滚 动时域优化是局部优化,因此容易陷入局部最 优。如图 2 所示,这种情况下无人机陷入了局部 最优,目标不可达,因此需要估计预测航迹端点 到目标点的代价。代价估计阶段根据给出的障碍 物和目标预先计算,当探测到环境发生改变将会 重新计算。航迹规划阶段使用预先计算的代价图 来估计航迹端点到目标点的代价。 −10 −8 −6 −4 −2 0 2 4 −10 −5 0 5 x y 图 2 不含代价图的航迹规划示意图 Fig. 2 The diagram of trajectory planning without cost map x(k+ Hp +1) f(∗) 文献[8]提出的代价图表示航迹端点到目标点 的时间估计值。基本思想为:在不考虑无人机自 身的动力学约束条件下,对于多边形的障碍物, 连接开始点、障碍物顶点和目标点,如果这些点 的连线没有穿过障碍物,则添加一条边,这样形 成的图称为可视图。对于可视图使用 Dijkstra[21] 单源最短路径算法,搜索从目标点到各个点的最 短路径。由第 3 节问题描述可知,航迹端点为 ,因此基于代价图的终端惩罚项 可 以表示如下: f(x(k+ Hp +1), χF)) = d(x(k+ Hp +1), xvis)+Cvis (10) xvis d(x(k+ Hp +1), xvis) Cvis 式中: 为基于代价图的可视点, 为航迹端点到可视点的代价, 为可视点到目标 点的代价。 然而,基于文献[8]提出的代价图,选择的可 视点为障碍物的顶点,这会导致规划出的航迹会 沿着障碍物边缘,降低无人机安全性。因此,我 们引入基于 VORONOI 图的可视图,VORONOI 图 的优点是使得可视点离障碍物的距离尽可能远, VORONOI 图使得可视点的选择不再是障碍物的 顶点,而是障碍物之间的顶点连线的中点。 p q dist(p,q) {p1, p2,··· , pn} n P 定义 1 VORONOI 图 [22]。任意两点 和 之 间的欧式距离,记作 ,假设平 面 P = 为平面上的任意 个互异的点, 所对 应的 VORONOI 图是平面的一个子区域的划分, n q Pi Pj j , i dist(q,Pi) < dist(q,Pj) 因此整个平面被划分成 个单元,具有以下性质: 任意一点 位于点 所对应的单元中,当且仅当对 于任意的 , 都有 。 根据定义 1 可知,VORONOI 多边形的每条边 上的点到相对应的两个点的距离相等,即 VORONOI 多边形上的点是到障碍物或威胁点的最远 点。因此可以得出,飞行器以 VORONOI 多边形 的顶点作为可视点,可以提高飞行器的安全系数。 n > 3 n 2n−5 3n−6 定理 1 VORONOI 图定理[22] :若 ,则在 与平面上任意 个基点相对应的 VORONOI 图中, 顶点的数目不会超过 ,而且边的数目不会超 过 。 2n 由定理 1 可知,采用基于 VORONOI 图的可 视点的方法,相对于文献[8],可视点呈线性增长, 并且小于 。 3.2 基于 RHC-FPSO 在线航迹规划 航迹规划是复杂约束条件下的最优化问题, 采用粒子群等智能优化算法进行航迹规划时,往 往算法迭代初期,控制输入和状态可能存在违反 约束的情况,算法需要迭代若干次才能产生满足 要求的输入,并在此基础上进一步寻优。粒子群 算法中种群最优个体影响着粒子搜索方向,如何 缩短搜索到可行输入的时间对提高算法的效率至 关重要。因此,我们根据粒子违反约束条件的程 度来更新粒子速度。 评价函数设计:评价函数用于给粒子群中每 个个体计算适应度。所有约束条件都满足的输入 粒子称为可行个体,违反任何一项约束条件的个 体称为不可行个体。在进行个体评价时遵循以下 准则: 1) 对于可行输入来说,根据式 (3),代价小的 输入优于代价大的输入; 2) 对于不可行航迹来说,约束违背小的输入 优于约束违背大的输入; 3) 对于可行输入与不可行输入,可行输入总 是优于不可行输入; 不可行输入意味着在实际中输入是不可行 的,因此没有必要计算它的代价,可以减少计算 量。基于以上分析,对任意输入,采用下面的评 价函数。 F(u) = { C(u), 可行解 BigM+C, 不可行解 (11) C(u) C 式中: 为式 (7) 计算的航迹代价,BigM 为一个 比较大的数。 为约束违背量,采用式 (12) 计算方式: C = ∑Hp i=1 (w1 f(li)+w2g(vi)+w3h(ai)) (12) 第 4 期 王文彬,等:基于滚动时域的无人机动态航迹规划 ·527·