正在加载图片...
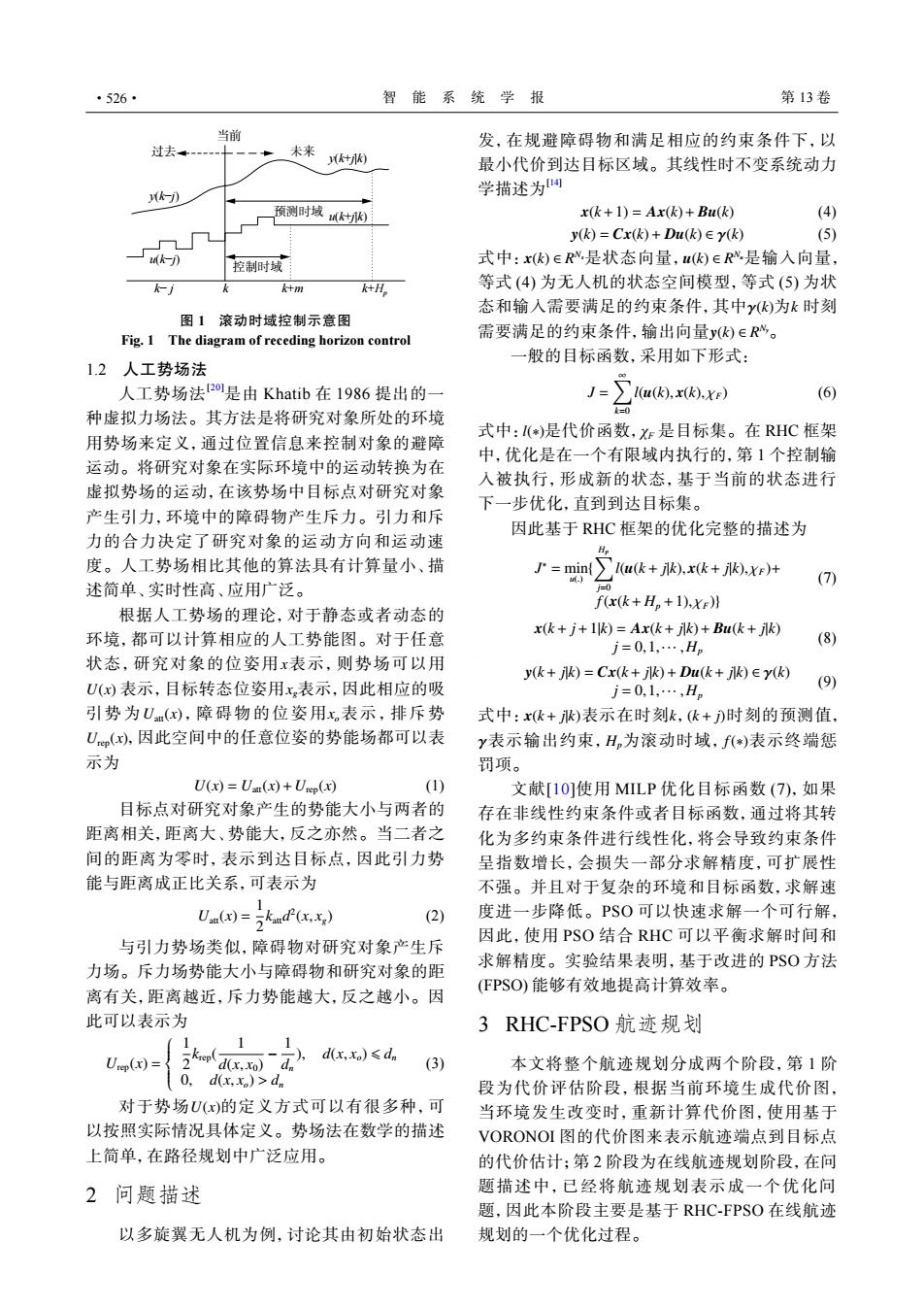
·526· 智能系统学报 第13卷 当前 发,在规避障碍物和满足相应的约束条件下,以 过去+ 一一未来 Wk+k) 最小代价到达目标区域。其线性时不变系统动力 kj) 学描述为 预测时域认+) x(k+1)=Ax(k)+Bu(k) (4) yk)=Cx(k)+Du(k)∈yk) (5) kj) 控制时域 式中:x(∈RW,是状态向量,(阳∈R是输入向量, k+m k+H。 等式(4)为无人机的状态空间模型,等式(⑤)为状 态和输入需要满足的约束条件,其中y为k时刻 图1滚动时域控制示意图 Fig.1 The diagram of receding horizon control 需要满足的约束条件,输出向量y()∈R心。 般的目标函数,采用如下形式: 1.2人工势场法 人工势场法2o是由Khatib在1986提出的一 J=2u.xW.xe) (6) 种虚拟力场法。其方法是将研究对象所处的环境 式中:I()是代价函数,F是目标集。在RHC框架 用势场来定义,通过位置信息来控制对象的避障 中,优化是在一个有限域内执行的,第1个控制输 运动。将研究对象在实际环境中的运动转换为在 入被执行,形成新的状态,基于当前的状态进行 虚拟势场的运动,在该势场中目标点对研究对象 下一步优化,直到到达目标集。 产生引力,环境中的障碍物产生斥力。引力和斥 因此基于RHC框架的优化完整的描述为 力的合力决定了研究对象的运动方向和运动速 度。人工势场相比其他的算法具有计算量小、描 mind I(u(k+jk).x(k+k).x)+ 述简单、实时性高、应用广泛。 j=0 (7) f(x(++1).X) 根据人工势场的理论,对于静态或者动态的 x(k+j+1k)=Ax(k+jk)+Bu(k+jik) 环境,都可以计算相应的人工势能图。对于任意 j=0,1,…,Hp (8) 状态,研究对象的位姿用x表示,则势场可以用 y(k+ilk)=Cx(k+jk)+Du(k+ik)ey(k) U()表示,目标转态位姿用x,表示,因此相应的吸 j=0,1,…,H2 (9) 引势为Um(x),障碍物的位姿用x表示,排斥势 式中:x(k+派)表示在时刻k,(k+)时刻的预测值, Up(x,因此空间中的任意位姿的势能场都可以表 y表示输出约束,H,为滚动时域,f()表示终端惩 示为 罚项。 U(x)=U.(x)+Urep(x) (1) 文献[10]使用MLP优化目标函数(7),如果 目标点对研究对象产生的势能大小与两者的 存在非线性约束条件或者目标函数,通过将其转 距离相关,距离大、势能大,反之亦然。当二者之 化为多约束条件进行线性化,将会导致约束条件 间的距离为零时,表示到达目标点,因此引力势 呈指数增长,会损失一部分求解精度,可扩展性 能与距离成正比关系,可表示为 不强。并且对于复杂的环境和目标函数,求解速 Um因)=ikmd(x,) (2) 度进一步降低。PSO可以快速求解一个可行解, 因此,使用PSO结合RHC可以平衡求解时间和 与引力势场类似,障碍物对研究对象产生斥 力场。斥力场势能大小与障碍物和研究对象的距 求解精度。实验结果表明,基于改进的PSO方法 (FPSO)能够有效地提高计算效率。 离有关,距离越近,斥力势能越大,反之越小。因 此可以表示为 3RHC-FPSO航迹规划 1 Urep(x)= kmd.而 dx,xo)≤dn (3) 本文将整个航迹规划分成两个阶段,第1阶 0,d(x,x)>d 段为代价评估阶段,根据当前环境生成代价图, 对于势场Ux)的定义方式可以有很多种,可 当环境发生改变时,重新计算代价图,使用基于 以按照实际情况具体定义。势场法在数学的描述 VORONOI图的代价图来表示航迹端点到目标点 上简单,在路径规划中广泛应用。 的代价估计;第2阶段为在线航迹规划阶段,在问 2问题描述 题描述中,已经将航迹规划表示成一个优化问 题,因此本阶段主要是基于RHC-FPSO在线航迹 以多旋翼无人机为例,讨论其由初始状态出 规划的一个优化过程。k− j k k+m 过去 当前 未来 控制时域 预测时域 k+Hp y(k−j) u(k−j) y(k+j|k) u(k+j|k) 图 1 滚动时域控制示意图 Fig. 1 The diagram of receding horizon control 1.2 人工势场法 人工势场法[20]是由 Khatib 在 1986 提出的一 种虚拟力场法。其方法是将研究对象所处的环境 用势场来定义,通过位置信息来控制对象的避障 运动。将研究对象在实际环境中的运动转换为在 虚拟势场的运动,在该势场中目标点对研究对象 产生引力,环境中的障碍物产生斥力。引力和斥 力的合力决定了研究对象的运动方向和运动速 度。人工势场相比其他的算法具有计算量小、描 述简单、实时性高、应用广泛。 x U(x) xg Uatt(x) xo Urep(x) 根据人工势场的理论,对于静态或者动态的 环境,都可以计算相应的人工势能图。对于任意 状态,研究对象的位姿用 表示,则势场可以用 表示,目标转态位姿用 表示,因此相应的吸 引势为 ,障碍物的位姿用 表示,排斥势 ,因此空间中的任意位姿的势能场都可以表 示为 U(x) = Uatt(x)+Urep(x) (1) 目标点对研究对象产生的势能大小与两者的 距离相关,距离大、势能大,反之亦然。当二者之 间的距离为零时,表示到达目标点,因此引力势 能与距离成正比关系,可表示为 Uatt(x) = 1 2 kattd 2 (x, xg) (2) 与引力势场类似,障碍物对研究对象产生斥 力场。斥力场势能大小与障碍物和研究对象的距 离有关,距离越近,斥力势能越大,反之越小。因 此可以表示为 Urep(x) = 1 2 krep( 1 d(x, x0) − 1 dn ), d(x, xo) ⩽ dn 0, d(x, xo) > dn (3) 对于势场 U(x) 的定义方式可以有很多种,可 以按照实际情况具体定义。势场法在数学的描述 上简单,在路径规划中广泛应用。 2 问题描述 以多旋翼无人机为例,讨论其由初始状态出 发,在规避障碍物和满足相应的约束条件下,以 最小代价到达目标区域。其线性时不变系统动力 学描述为[14] x(k+1) = Ax(k)+ Bu(k) (4) y(k) = Cx(k)+ Du(k) ∈ γ(k) (5) x(k) ∈ R Nx u(k) ∈ R Nu γ(k) k y(k) ∈ R Ny 式中: 是状态向量, 是输入向量, 等式 (4) 为无人机的状态空间模型,等式 (5) 为状 态和输入需要满足的约束条件,其中 为 时刻 需要满足的约束条件,输出向量 。 一般的目标函数,采用如下形式: J = ∑∞ k=0 l(u(k), x(k), χF) (6) 式中: l(∗) 是代价函数,χF 是目标集。在 RHC 框架 中,优化是在一个有限域内执行的,第 1 个控制输 入被执行,形成新的状态,基于当前的状态进行 下一步优化,直到到达目标集。 因此基于 RHC 框架的优化完整的描述为 J ∗ = min u(.) { ∑Hp j=0 l(u(k+ j|k), x(k+ j|k), χF)+ f(x(k+ Hp +1), χF)} (7) x(k+ j+1|k) = Ax(k+ j|k)+ Bu(k+ j|k) j = 0,1,··· ,Hp (8) y(k+ j|k) = Cx(k+ j|k)+ Du(k+ j|k) ∈ γ(k) j = 0,1,··· ,Hp (9) x(k+ j|k) k (k+ j) γ Hp f(∗) 式中: 表示在时刻 , 时刻的预测值, 表示输出约束, 为滚动时域, 表示终端惩 罚项。 文献[10]使用 MILP 优化目标函数 (7),如果 存在非线性约束条件或者目标函数,通过将其转 化为多约束条件进行线性化,将会导致约束条件 呈指数增长,会损失一部分求解精度,可扩展性 不强。并且对于复杂的环境和目标函数,求解速 度进一步降低。PSO 可以快速求解一个可行解, 因此,使用 PSO 结合 RHC 可以平衡求解时间和 求解精度。实验结果表明,基于改进的 PSO 方法 (FPSO) 能够有效地提高计算效率。 3 RHC-FPSO 航迹规划 本文将整个航迹规划分成两个阶段,第 1 阶 段为代价评估阶段,根据当前环境生成代价图, 当环境发生改变时,重新计算代价图,使用基于 VORONOI 图的代价图来表示航迹端点到目标点 的代价估计;第 2 阶段为在线航迹规划阶段,在问 题描述中,已经将航迹规划表示成一个优化问 题,因此本阶段主要是基于 RHC-FPSO 在线航迹 规划的一个优化过程。 ·526· 智 能 系 统 学 报 第 13 卷