正在加载图片...
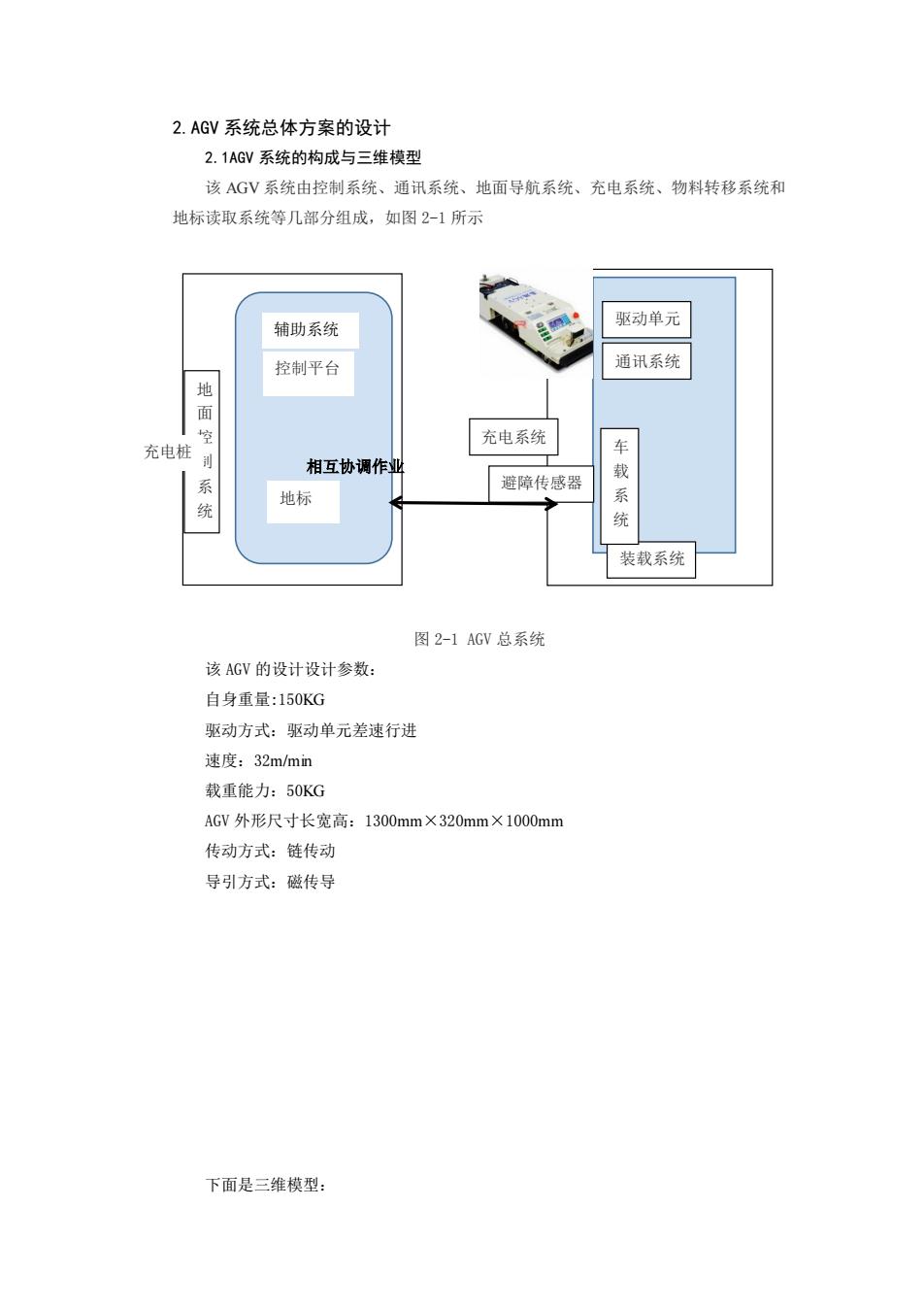
2.AGV系统总体方案的设计 2.1AGV系统的构成与三维模型 该AGV系统由控制系统、通讯系统、地面导航系统、充电系统、物料转移系统和 地标读取系统等几部分组成,如图2-1所示 辅助系统 驱动单元 控制平台 通讯系统 地 充电系统 充电桩 空利 车 相互协调作业 系 避障传感器 载 地标 系 装载系统 图2-1AGV总系统 该AGV的设计设计参数: 自身重量:150KG 驱动方式:驱动单元差速行进 速度:32 m/min 载重能力:50KG AGV外形尺寸长宽高:1300mm×320mm×1000mm 传动方式:链传动 导引方式:磁传导 下面是三维模型:2.AGV 系统总体方案的设计 2.1AGV 系统的构成与三维模型 该 AGV 系统由控制系统、通讯系统、地面导航系统、充电系统、物料转移系统和 地标读取系统等几部分组成,如图 2-1 所示 图 2-1 AGV 总系统 该 AGV 的设计设计参数: 自身重量:150KG 驱动方式:驱动单元差速行进 速度:32m/min 载重能力:50KG AGV 外形尺寸长宽高:1300mm×320mm×1000mm 传动方式:链传动 导引方式:磁传导 下面是三维模型: 地 面 控 制 系 统 控制平台 驱动单元 充电桩 充电系统 地标 通讯系统 避障传感器 装载系统 辅助系统 相互协调作业 车 载 系 统