正在加载图片...
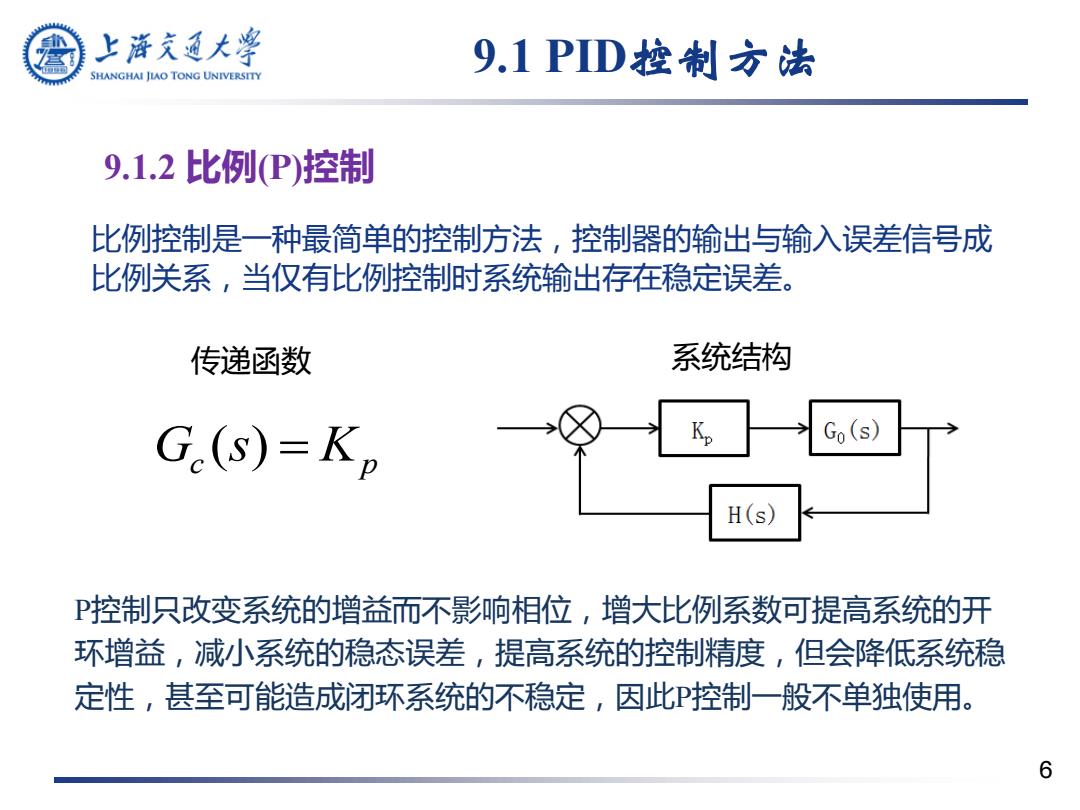
上游充通大学 9.1PID控制方法 SHANGHAI JLAO TONG UNIVERSITY 9.1.2比例(P)控制 比例控制是一种最简单的控制方法,控制器的输出与输入误差信号成 比例关系,当仅有比例控制时系统输出存在稳定误差。 传递函数 系统结构 G.(s)=Kp Go(s) H(s) P控制只改变系统的增益而不影响相位,增大比例系数可提高系统的开 环增益,减小系统的稳态误差,提高系统的控制精度,但会降低系统稳 定性,甚至可能造成闭环系统的不稳定,因此P控制一般不单独使用。 66 9.1 PID控制方法 比例控制是一种最简单的控制方法,控制器的输出与输入误差信号成 比例关系,当仅有比例控制时系统输出存在稳定误差。 9.1.2 比例(P)控制 c Kp G (s) P控制只改变系统的增益而不影响相位,增大比例系数可提高系统的开 环增益,减小系统的稳态误差,提高系统的控制精度,但会降低系统稳 定性,甚至可能造成闭环系统的不稳定,因此P控制一般不单独使用。 传递函数 系统结构