正在加载图片...
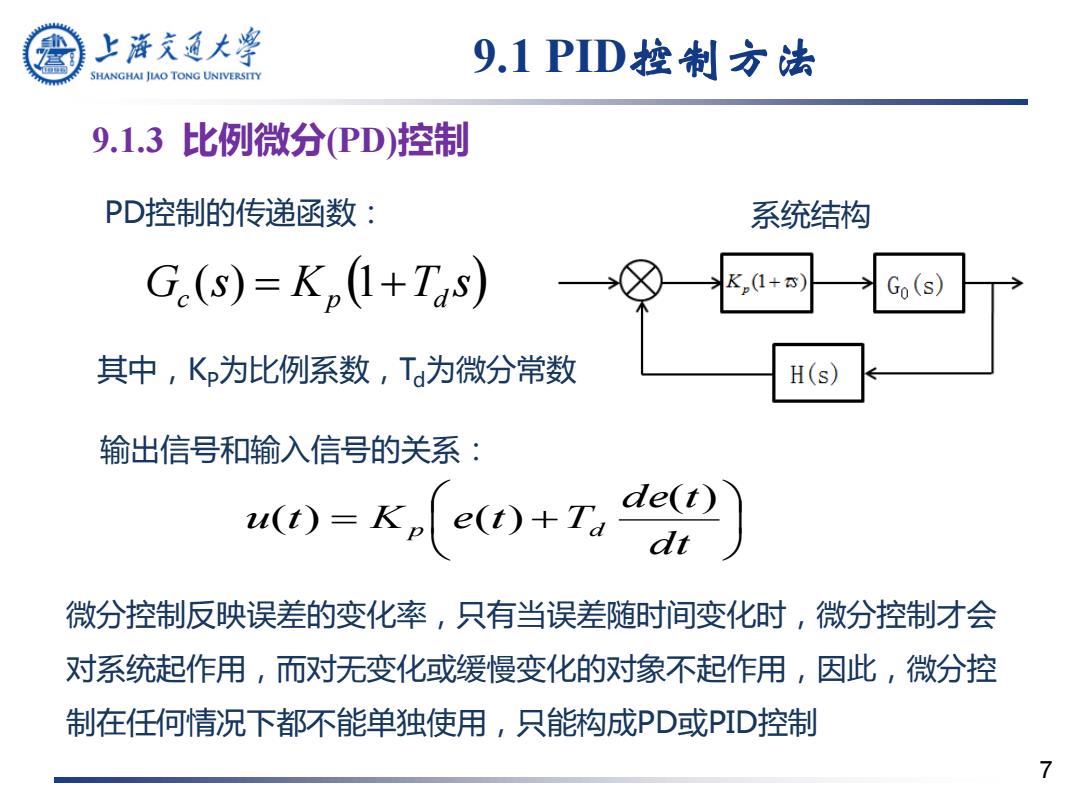
上游充通大学 9.1PID控制方法 SHANGHAI JLAO TONG UNIVERSITY 9.1.3比例微分(PD)控制 PD控制的传递函数: 系统结构 G(s)=K,(1+Tas K,(1+) Go(s) 其中,K为比例系数,T为微分常数 H(s) 输出信号和输入信号的关系: u-kr do 微分控制反映误差的变化率,只有当误差随时间变化时,微分控制才会 对系统起作用,而对无变化或缓慢变化的对象不起作用,因此,微分控 制在任何情况下都不能单独使用,只能构成PD或PID控制 77 9.1 PID控制方法 PD控制的传递函数: G s K T s c p 1 d ( ) dt de t u t Kp e t Td ( ) ( ) ( ) 微分控制反映误差的变化率,只有当误差随时间变化时,微分控制才会 对系统起作用,而对无变化或缓慢变化的对象不起作用,因此,微分控 制在任何情况下都不能单独使用,只能构成PD或PID控制 输出信号和输入信号的关系: 9.1.3 比例微分(PD)控制 系统结构 其中,KP为比例系数,Td为微分常数