正在加载图片...
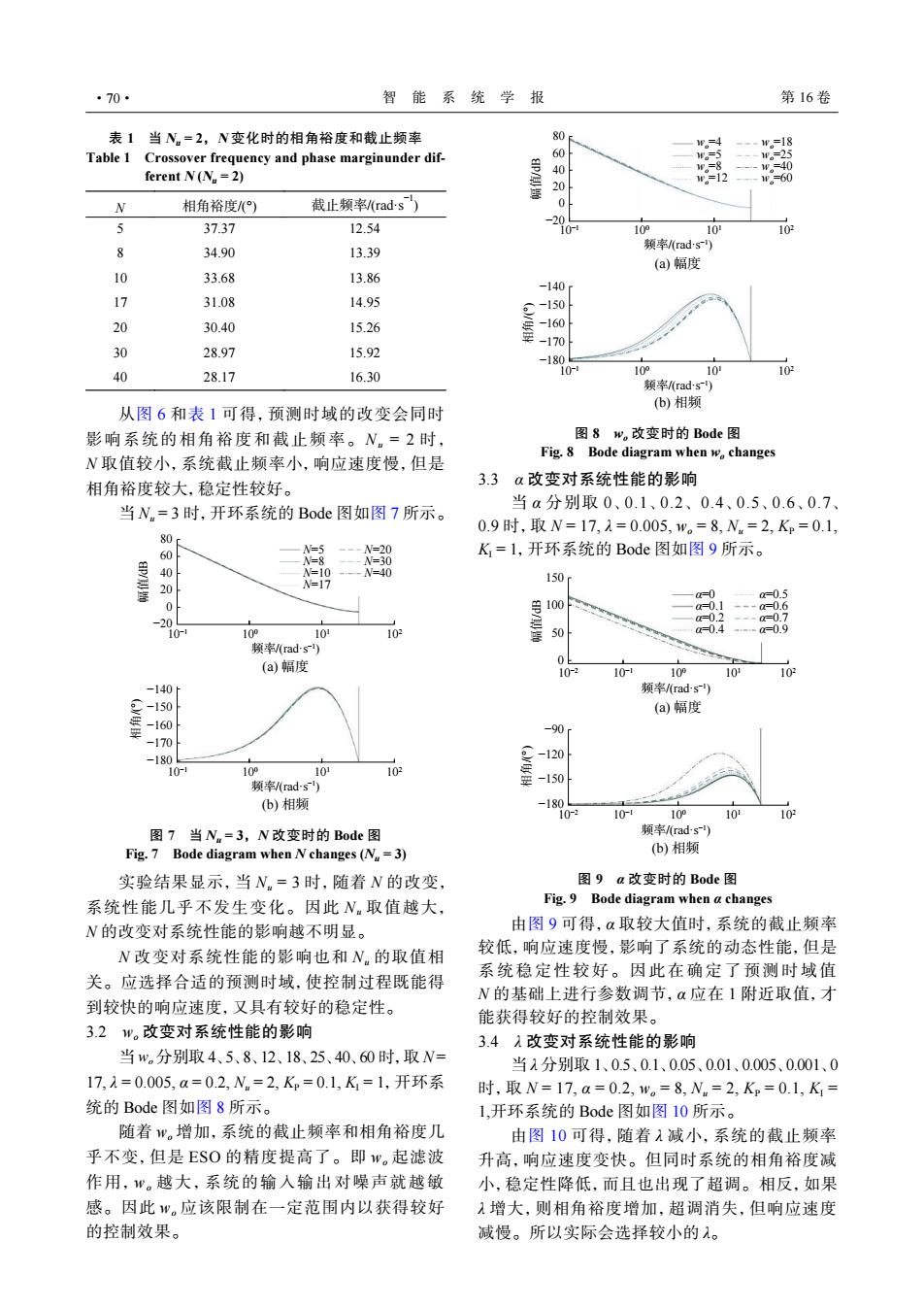
·70· 智能系统学报 第16卷 表1当N。=2,N变化时的相角裕度和截止频率 80 10=4 -w=18 Table 1 Crossover frequency and phase marginunder dif- ferent N(N=2) ap/ 28 。60 w 相角裕度/() 截止频率rads 0 37.37 12.54 2 0- 10p 101 10 P 34.90 13.39 颜率/(rads) (a)幅度 10 33.68 13.86 -140 17 31.08 14.95 -150 20 30.40 15.26 -160 要 -170 30 28.97 15.92 -180 40 28.17 16.30 10- 10p 10 10 频率/(rads) (b)相频 从图6和表1可得,预测时域的改变会同时 影响系统的相角裕度和截止频率。N。=2时, 图8w,改变时的Bode图 Fig.8 Bode diagram when w changes N取值较小,系统截止频率小,响应速度慢,但是 相角裕度较大,稳定性较好。 3.3α改变对系统性能的影响 当N=3时,开环系统的Bode图如图7所示。 当a分别取0、0.1、0.2、0.4、0.5、0.6、0.7、 0.9时,取N=17,1=0.005,1w。=8,N=2,K=0.1, 80 K=1,开环系统的Bode图如图9所示。 Bp斯 % N=40 150 20 =17 a=0.5 0 9100 =06 -20L =07 10- 109 101 10 50 =0.4 =0.9 频率/rads) (a)幅度 0 10-2 10- 109 101 103 -140 频率/(rads) -150 (a)幅度 -160 -90 -170 -180 -120 10 10 10 102 -150 频率/(rads) (b)相频 -180 0-2 10 10 101 图7当Nn=3,N改变时的Bode图 频率/rads) Fig.7 Bode diagram when N changes(N=3) (b)相频 实验结果显示,当N=3时,随着N的改变, 图9a改变时的Bode图 系统性能几乎不发生变化。因此N.取值越大, Fig.9 Bode diagram when a changes N的改变对系统性能的影响越不明显。 由图9可得,α取较大值时,系统的截止频率 N改变对系统性能的影响也和N,的取值相 较低,响应速度慢,影响了系统的动态性能,但是 关。应选择合适的预测时域,使控制过程既能得 系统稳定性较好。因此在确定了预测时域值 N的基础上进行参数调节,α应在1附近取值,才 到较快的响应速度,又具有较好的稳定性。 能获得较好的控制效果。 3.2w。改变对系统性能的影响 3.41改变对系统性能的影响 当w。分别取4、5、8、12、18、25、40、60时,取N= 当1分别取1、0.5、0.1、0.05、0.01、0.005、0.001、0 17,1=0.005,a=0.2,N=2,Kp=0.1,K=1,开环系 时,取N=17,a=0.2,w。=8,N.=2,Kp=0.1,K= 统的Bode图如图8所示。 l,开环系统的Bode图如图10所示。 随着"。增加,系统的截止频率和相角裕度几 由图10可得,随着1减小,系统的截止频率 乎不变,但是ESO的精度提高了。即w。起滤波 升高,响应速度变快。但同时系统的相角裕度减 作用,w。越大,系统的输入输出对噪声就越敏 小,稳定性降低,而且也出现了超调。相反,如果 感。因此"。应该限制在一定范围内以获得较好 入增大,则相角裕度增加,超调消失,但响应速度 的控制效果。 减慢。所以实际会选择较小的1。表 1 当 Nu = 2,N 变化时的相角裕度和截止频率 Table 1 Crossover frequency and phase marginunder different N (Nu = 2) N 相角裕度/(°) 截止频率/(rad·s−1) 5 37.37 12.54 8 34.90 13.39 10 33.68 13.86 17 31.08 14.95 20 30.40 15.26 30 28.97 15.92 40 28.17 16.30 从图 6 和表 1 可得,预测时域的改变会同时 影响系统的相角裕度和截止频率。Nu = 2 时 , N 取值较小,系统截止频率小,响应速度慢,但是 相角裕度较大,稳定性较好。 当 Nu = 3 时,开环系统的 Bode 图如图 7 所示。 80 60 40 20 0 −20 −140 −150 −160 −170 −180 幅值/dB 相角/(°) 10−1 100 101 102 频率/(rad·s−1) 10−1 100 101 102 频率/(rad·s−1) N=5 N=8 N=10 N=20 N=30 N=40 N=17 (a) 幅度 (b) 相频 图 7 当 Nu = 3,N 改变时的 Bode 图 Fig. 7 Bode diagram when N changes (Nu = 3) 实验结果显示,当 Nu = 3 时,随着 N 的改变, 系统性能几乎不发生变化。因此 Nu 取值越大, N 的改变对系统性能的影响越不明显。 N 改变对系统性能的影响也和 Nu 的取值相 关。应选择合适的预测时域,使控制过程既能得 到较快的响应速度,又具有较好的稳定性。 3.2 wo 改变对系统性能的影响 当 wo 分别取 4、5、8、12、18、25、40、60 时,取 N= 17, λ = 0.005, α = 0.2, Nu = 2, KP = 0.1, KI = 1,开环系 统的 Bode 图如图 8 所示。 随着 wo 增加,系统的截止频率和相角裕度几 乎不变,但是 ESO 的精度提高了。即 wo 起滤波 作用,wo 越大,系统的输入输出对噪声就越敏 感。因此 wo 应该限制在一定范围内以获得较好 的控制效果。 80 60 40 20 0 −20 −140 −150 −160 −170 −180 幅值/dB 相角/(°) 10−1 100 101 102 频率/(rad·s−1) 10−1 100 101 102 频率/(rad·s−1) wo=4 wo=5 wo=8 wo=18 wo=25 wo=40 wo=12 wo=60 (a) 幅度 (b) 相频 图 8 wo 改变时的 Bode 图 Fig. 8 Bode diagram when wo changes 3.3 α 改变对系统性能的影响 当 α 分别取 0、0.1、0.2、 0.4、0.5、0.6、0.7、 0.9 时,取 N = 17, λ = 0.005, wo = 8, Nu = 2, KP = 0.1, KI = 1,开环系统的 Bode 图如图 9 所示。 α=0 α=0.1 α=0.2 α=0.4 α=0.5 α=0.6 α=0.7 α=0.9 150 100 50 0 −90 −120 −150 −180 幅值/dB 相角/(°) 10−1 10−2 100 101 102 频率/(rad·s−1) 10−1 10−2 100 101 102 频率/(rad·s−1) (a) 幅度 (b) 相频 图 9 α 改变时的 Bode 图 Fig. 9 Bode diagram when α changes 由图 9 可得,α 取较大值时,系统的截止频率 较低,响应速度慢,影响了系统的动态性能,但是 系统稳定性较好。因此在确定了预测时域值 N 的基础上进行参数调节,α 应在 1 附近取值,才 能获得较好的控制效果。 3.4 λ 改变对系统性能的影响 当 λ 分别取 1、0.5、0.1、0.05、0.01、0.005、0.001、0 时,取 N = 17, α = 0.2, wo = 8, Nu = 2, KP = 0.1, KI = 1,开环系统的 Bode 图如图 10 所示。 由图 10 可得,随着 λ 减小,系统的截止频率 升高,响应速度变快。但同时系统的相角裕度减 小,稳定性降低,而且也出现了超调。相反,如果 λ 增大,则相角裕度增加,超调消失,但响应速度 减慢。所以实际会选择较小的 λ。 ·70· 智 能 系 统 学 报 第 16 卷