正在加载图片...
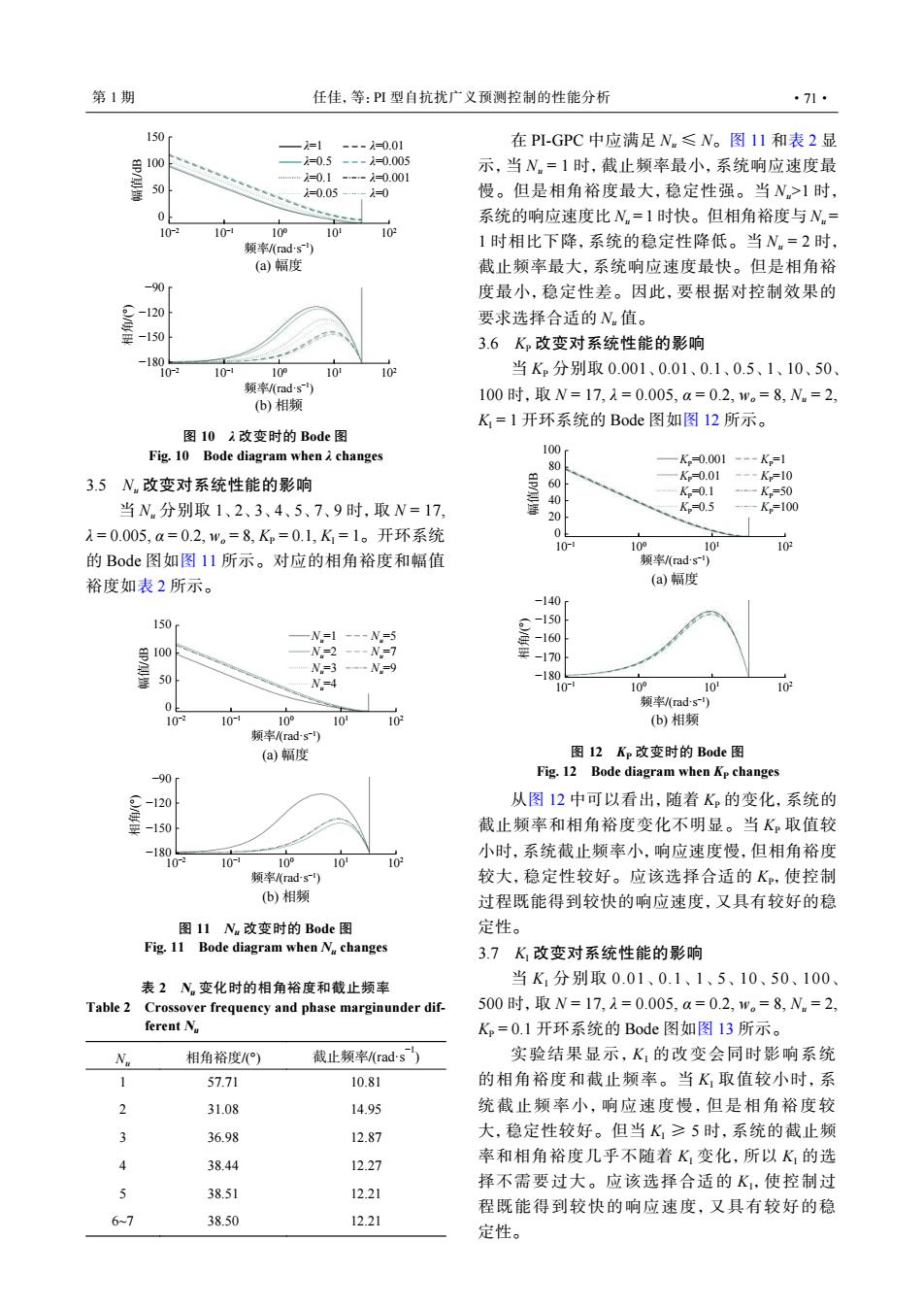
第1期 任佳,等:PI型自抗扰广义预测控制的性能分析 ·71· 150 =1 ---1-0.01 在PI-GPC中应满足N.≤N。图11和表2显 -=0.5 ---=0.005 示,当N。=1时,截止频率最小,系统响应速度最 1=0.1---1=0.001 50 =0.05 =0 慢。但是相角裕度最大,稳定性强。当N>1时, 系统的响应速度比N=1时快。但相角裕度与N= 10-2 10 10 101 10 频率/(ads) 1时相比下降,系统的稳定性降低。当N,=2时, (a)幅度 截止频率最大,系统响应速度最快。但是相角裕 -90 度最小,稳定性差。因此,要根据对控制效果的 -120 要求选择合适的N值。 -150 3.6K,改变对系统性能的影响 -18 10-2 10- 100 10 102 当Kp分别取0.001、0.01、0.1、0.5、1、10、50 频率(rads (b)相频 100时,取N=17,1=0.005,a=02,p。=8,Nm=2, K=1开环系统的Bode图如图12所示。 图101改变时的Bode图 Fig.10 Bode diagram when 2changes 100 80 K=0.001---K=1 K=0.01 ---K=10 3.5N,改变对系统性能的影响 60 -K=50 40 K=0.1 当N分别取1、2、3、4、5、7、9时,取N=17, K=0.5 K=100 20 1=0.005,a=0.2,w。=8,K=0.1,K=1。开环系统 10 10 10 109 的Bode图如图11所示。对应的相角裕度和幅值 频率(ads) 裕度如表2所示。 (a)幅度 -140r 150 -150 N=1 ---N=5 -160 N=2 ---N=7 -170 N=3 ---N=9 50 -1804 N=4 10° 10° 10 10 频率(rads 102 10 10° o 10 (b)相频 频率(rads) (a)幅度 图12Kp改变时的Bode图 -90r Fig.12 Bode diagram when Kp changes 从图12中可以看出,随着K,的变化,系统的 -150 截止频率和相角裕度变化不明显。当K。取值较 -180 小时,系统截止频率小,响应速度慢,但相角裕度 02 10 10° 10 10 频率/(rad.s-) 较大,稳定性较好。应该选择合适的K。,使控制 (b)相频 过程既能得到较快的响应速度,又具有较好的稳 图11N改变时的Bode图 定性。 Fig.11 Bode diagram when N changes 3.7K改变对系统性能的影响 表2N变化时的相角裕度和截止频率 当K1分别取0.01、0.1、1、5、10、50、100 Table 2 Crossover frequency and phase marginunder dif- 500时,取N=17,1=0.005,a=0.2,w。=8,N.=2, ferent N K,=0.1开环系统的Bode图如图13所示。 Nu 相角裕度/() 截止频率rads 实验结果显示,K的改变会同时影响系统 1 57.71 10.81 的相角裕度和截止频率。当K取值较小时,系 2 31.08 14.95 统截止频率小,响应速度慢,但是相角裕度较 3 36.98 12.87 大,稳定性较好。但当K,≥5时,系统的截止频 4 38.44 12.27 率和相角裕度几乎不随着K,变化,所以K的选 5 择不需要过大。应该选择合适的K,使控制过 38.51 12.21 程既能得到较快的响应速度,又具有较好的稳 6-7 38.50 12.21 定性。λ=1 λ=0.5 λ=0.1 λ=0.05 λ=0.01 λ=0.005 λ=0.001 λ=0 150 100 50 0 −90 −120 −150 −180 幅值/dB 相角/(°) 10−1 10−2 100 101 102 频率/(rad·s−1) 10−1 10−2 100 101 102 频率/(rad·s−1) (a) 幅度 (b) 相频 图 10 λ 改变时的 Bode 图 Fig. 10 Bode diagram when λ changes 3.5 Nu 改变对系统性能的影响 当 Nu 分别取 1、2、3、4、5、7、9 时,取 N = 17, λ = 0.005, α = 0.2, wo = 8, KP = 0.1, KI = 1。开环系统 的 Bode 图如图 11 所示。对应的相角裕度和幅值 裕度如表 2 所示。 Nu=1 Nu=2 Nu=3 Nu=4 Nu=5 Nu=7 Nu=9 150 100 50 0 −90 −120 −150 −180 幅值/dB 相角/(°) 10−1 10−2 100 101 102 频率/(rad·s−1) 10−1 10−2 100 101 102 频率/(rad·s−1) (a) 幅度 (b) 相频 图 11 Nu 改变时的 Bode 图 Fig. 11 Bode diagram when Nu changes 表 2 Nu 变化时的相角裕度和截止频率 Table 2 Crossover frequency and phase marginunder different Nu Nu 相角裕度/(°) 截止频率/(rad·s−1) 1 57.71 10.81 2 31.08 14.95 3 36.98 12.87 4 38.44 12.27 5 38.51 12.21 6~7 38.50 12.21 在 PI-GPC 中应满足 Nu ≤ N。图 11 和表 2 显 示,当 Nu = 1 时,截止频率最小,系统响应速度最 慢。但是相角裕度最大,稳定性强。当 Nu>1 时, 系统的响应速度比 Nu = 1 时快。但相角裕度与 Nu = 1 时相比下降,系统的稳定性降低。当 Nu = 2 时, 截止频率最大,系统响应速度最快。但是相角裕 度最小,稳定性差。因此,要根据对控制效果的 要求选择合适的 Nu 值。 3.6 KP 改变对系统性能的影响 当 KP 分别取 0.001、0.01、0.1、0.5、1、10、50、 100 时,取 N = 17, λ = 0.005, α = 0.2, wo = 8, Nu = 2, KI = 1 开环系统的 Bode 图如图 12 所示。 KP=0.001 KP=0.01 KP=0.1 KP=0.5 KP=1 KP=10 KP=50 KP=100 100 80 60 40 20 0 −140 −160 −150 −170 −180 幅值/dB 相角/(°) 10−1 100 101 102 频率/(rad·s−1) 10−1 100 101 102 频率/(rad·s−1) (a) 幅度 (b) 相频 图 12 KP 改变时的 Bode 图 Fig. 12 Bode diagram when KP changes 从图 12 中可以看出,随着 KP 的变化,系统的 截止频率和相角裕度变化不明显。当 KP 取值较 小时,系统截止频率小,响应速度慢,但相角裕度 较大,稳定性较好。应该选择合适的 KP,使控制 过程既能得到较快的响应速度,又具有较好的稳 定性。 3.7 KI 改变对系统性能的影响 当 KI 分别取 0.01、0.1、1、5、10、50、100、 500 时,取 N = 17, λ = 0.005, α = 0.2, wo = 8, Nu = 2, KP = 0.1 开环系统的 Bode 图如图 13 所示。 实验结果显示,KI 的改变会同时影响系统 的相角裕度和截止频率。当 KI 取值较小时,系 统截止频率小,响应速度慢,但是相角裕度较 大,稳定性较好。但当 KI ≥ 5 时,系统的截止频 率和相角裕度几乎不随着 KI 变化,所以 KI 的选 择不需要过大。应该选择合适的 KI,使控制过 程既能得到较快的响应速度,又具有较好的稳 定性。 第 1 期 任佳,等:PI 型自抗扰广义预测控制的性能分析 ·71·