正在加载图片...
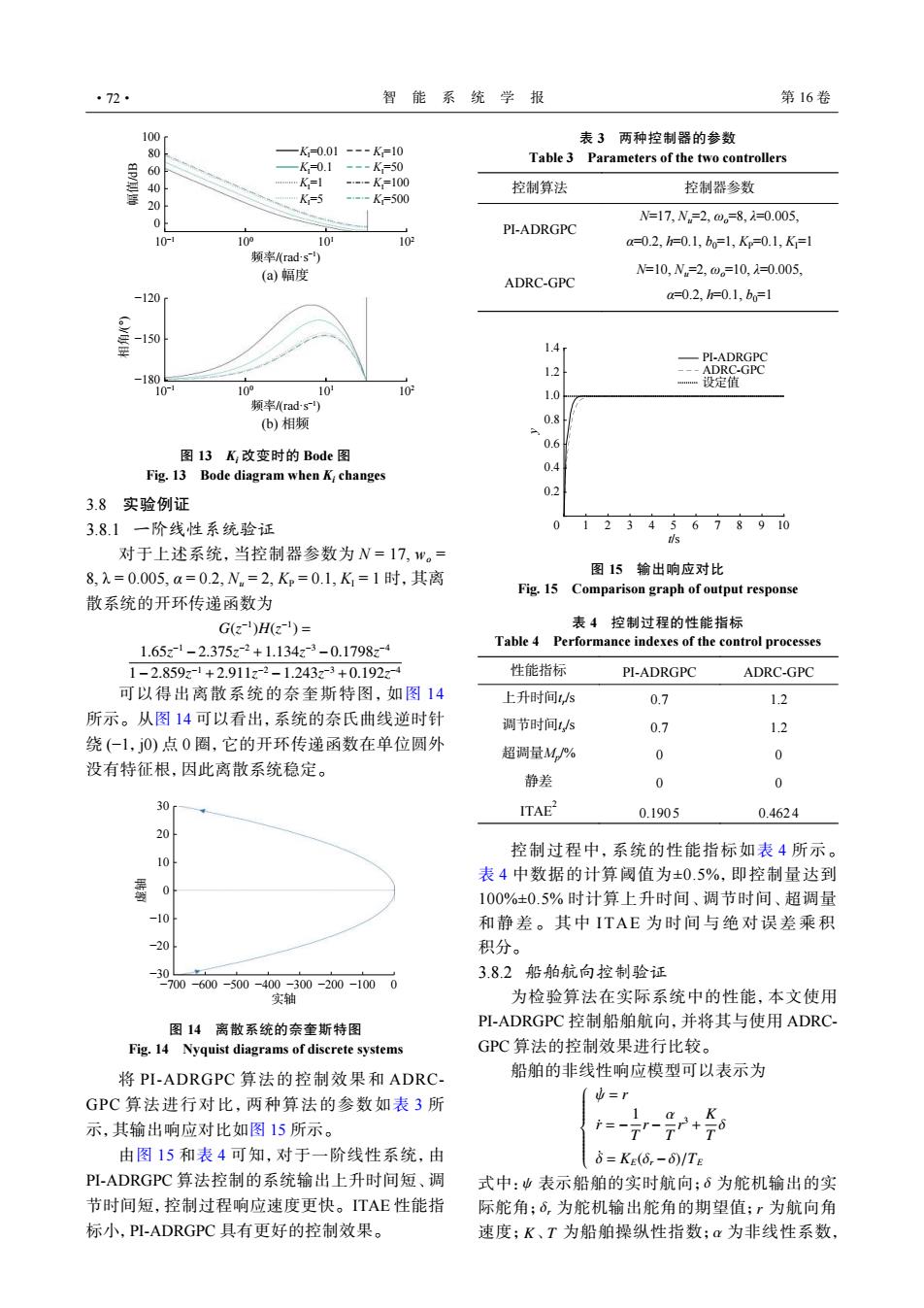
·72· 智能系统学报 第16卷 100 表3两种控制器的参数 80 K=0.01 ---K=10 Table 3 Parameters of the two controllers -K=0.1 ---K=50 4 K-1 --K=100 控制算法 控制器参数 “K=5 ---K=500 0 N=17,N,=2,m。=8,=0.005, PI-ADRGPC 10- 100 10 102 a=02,h=0.l,bw=1,K=0.1,K=l 频率/(rads) (a)幅度 N=10,N=2,0。=10,1=0.005, ADRC-GPC -120 a=0.2,h=0.1,b=1 安-150 1.4r PI-ADRGPC 12 ADRC-GPC -1 10 uam设定值 10 10 10 1.0 频率(rads) (b)相频 0.8 0.6 图13K,改变时的Bode图 Fig.13 Bode diagram when K changes 0.4 02 3.8实验例证 3.81一阶线性系统验证 012345678910 s 对于上述系统,当控制器参数为N=17,w。= 8,入=0.005,a=0.2,N=2,Kp=0.1,K=1时,其离 图15输出响应对比 Fig.15 Comparison graph of output response 散系统的开环传递函数为 G(z1)H(z1)= 表4控制过程的性能指标 1.65z1-2.375z2+1.134z3-0.1798z4 Table 4 Performance indexes of the control processes 1-2.859z-1+2.911z2-1.243z3+0.192z 性能指标 PI-ADRGPC ADRC-GPC 可以得出离散系统的奈奎斯特图,如图14 上升时间,s 0.7 1.2 所示。从图14可以看出,系统的奈氏曲线逆时针 调节时间1,s 0.7 1.2 绕(一1,j0)点0圈,它的开环传递函数在单位圆外 超调量M/% 0 0 没有特征根,因此离散系统稳定。 静差 0 0 30 ITAE2 0.1905 0.4624 20 控制过程中,系统的性能指标如表4所示。 10 表4中数据的计算阈值为±0.5%,即控制量达到 0 100%±0.5%时计算上升时间、调节时间、超调量 -10 和静差。其中ITAE为时间与绝对误差乘积 -20 积分。 -30 3.8.2船舶航向控制验证 -700-600-500-400-300-200-1000 实轴 为检验算法在实际系统中的性能,本文使用 图14离散系统的奈奎斯特图 PI-ADRGPC控制船舶航向,并将其与使用ADRC- Fig.14 Nyquist diagrams of discrete systems GPC算法的控制效果进行比较。 将PI-ADRGPC算法的控制效果和ADRC 船舶的非线性响应模型可以表示为 山=r GPC算法进行对比,两种算法的参数如表3所 示,其输出响应对比如图15所示。 -+ 由图15和表4可知,对于一阶线性系统,由 6=KE(6,-6)/TE PI-ADRGPC算法控制的系统输出上升时间短、调 式中:业表示船舶的实时航向;6为舵机输出的实 节时间短,控制过程响应速度更快。TAE性能指 际舵角;6,为舵机输出舵角的期望值;r为航向角 标小,PI-ADRGPC具有更好的控制效果。 速度;K、T为船舶操纵性指数;α为非线性系数,KI=0.01 KI=0.1 KI=1 KI=5 KI=10 KI=50 KI=100 KI=500 100 80 60 40 20 0 −150 −120 −180 幅值/dB 相角/(°) 10−1 100 101 102 频率/(rad·s−1) 10−1 100 101 102 频率/(rad·s−1) (a) 幅度 (b) 相频 图 13 Ki 改变时的 Bode 图 Fig. 13 Bode diagram when Ki changes 3.8 实验例证 3.8.1 一阶线性系统验证 对于上述系统,当控制器参数为 N = 17, wo = 8, λ = 0.005, α = 0.2, Nu = 2, KP = 0.1, KI = 1 时,其离 散系统的开环传递函数为 G(z −1 )H(z −1 ) = 1.65z −1 −2.375z −2 +1.134z −3 −0.1798z −4 1−2.859z −1 +2.911z −2 −1.243z −3 +0.192z −4 可以得出离散系统的奈奎斯特图,如图 14 所示。从图 14 可以看出,系统的奈氏曲线逆时针 绕 (−1,j0) 点 0 圈,它的开环传递函数在单位圆外 没有特征根,因此离散系统稳定。 30 20 10 0 −10 −20 −30 −700 −600 −500 −400 −300 −200 −100 0 虚轴 实轴 图 14 离散系统的奈奎斯特图 Fig. 14 Nyquist diagrams of discrete systems 将 PI-ADRGPC 算法的控制效果和 ADRCGPC 算法进行对比,两种算法的参数如表 3 所 示,其输出响应对比如图 15 所示。 由图 15 和表 4 可知,对于一阶线性系统,由 PI-ADRGPC 算法控制的系统输出上升时间短、调 节时间短,控制过程响应速度更快。ITAE 性能指 标小,PI-ADRGPC 具有更好的控制效果。 表 3 两种控制器的参数 Table 3 Parameters of the two controllers 控制算法 控制器参数 PI-ADRGPC N=17, Nu=2, ωo=8, λ=0.005, α=0.2, h=0.1, b0=1, KP=0.1, KI=1 ADRC-GPC N=10, Nu=2, ωo=10, λ=0.005, α=0.2, h=0.1, b0=1 0 1 2 3 4 5 6 7 8 9 10 0.2 0.4 0.6 0.8 1.0 1.2 1.4 y PI-ADRGPC ADRC-GPC 设定值 t/s 图 15 输出响应对比 Fig. 15 Comparison graph of output response 表 4 控制过程的性能指标 Table 4 Performance indexes of the control processes 性能指标 PI-ADRGPC ADRC-GPC 上升时间tr /s 0.7 1.2 调节时间ts /s 0.7 1.2 超调量Mp /% 0 0 静差 0 0 ITAE2 0.190 5 0.462 4 控制过程中,系统的性能指标如表 4 所示。 表 4 中数据的计算阈值为±0.5%,即控制量达到 100%±0.5% 时计算上升时间、调节时间、超调量 和静差。其 中 ITAE 为时间与绝对误差乘积 积分。 3.8.2 船舶航向控制验证 为检验算法在实际系统中的性能,本文使用 PI-ADRGPC 控制船舶航向,并将其与使用 ADRCGPC 算法的控制效果进行比较。 船舶的非线性响应模型可以表示为 ψ˙ = r r˙ = − 1 T r − α T r 3 + K T δ δ˙ = KE(δr −δ)/TE ψ δ δr r K T α 式中: 表示船舶的实时航向; 为舵机输出的实 际舵角; 为舵机输出舵角的期望值; 为航向角 速度; 、 为船舶操纵性指数; 为非线性系数, ·72· 智 能 系 统 学 报 第 16 卷