正在加载图片...
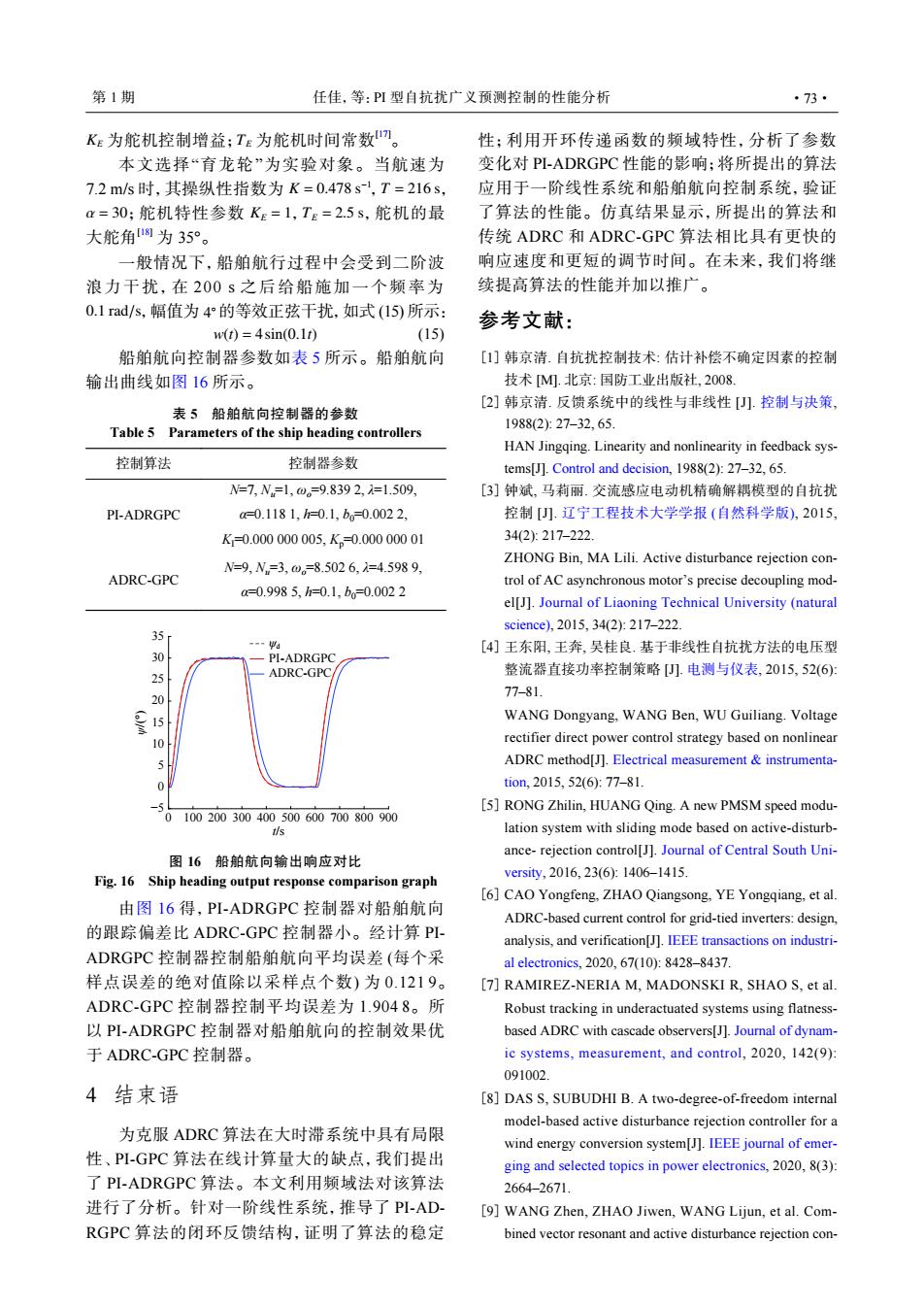
第1期 任佳,等:PI型自抗扰广义预测控制的性能分析 ·73· K为舵机控制增益;Te为舵机时间常数。 性;利用开环传递函数的频域特性,分析了参数 本文选择“育龙轮”为实验对象。当航速为 变化对PL-ADRGPC性能的影响;将所提出的算法 7.2ms时,其操纵性指数为K=0.478s,T=216s, 应用于一阶线性系统和船舶航向控制系统,验证 a=30:舵机特性参数KE=1,Te=2.5s,舵机的最 了算法的性能。仿真结果显示,所提出的算法和 大舵角18为35°。 传统ADRC和ADRC-GPC算法相比具有更快的 般情况下,船舶航行过程中会受到二阶波 响应速度和更短的调节时间。在未来,我们将继 浪力干扰,在200s之后给船施加一个频率为 续提高算法的性能并加以推广。 0.1rad/s,幅值为4°的等效正弦干扰,如式(15)所示: 参考文献: w(t0=4sin(0.1t0 (15) 船舶航向控制器参数如表5所示。船舶航向 [1]韩京清.自抗扰控制技术:估计补偿不确定因素的控制 输出曲线如图16所示。 技术M.北京:国防工业出版社,2008. [2]韩京清.反馈系统中的线性与非线性[.控制与决策, 表5船舶航向控制器的参数 Table 5 Parameters of the ship heading controllers 1988(227-32,65. HAN Jingqing.Linearity and nonlinearity in feedback sys- 控制算法 控制器参数 tems[J].Control and decision,1988(2):27-32,65. N=7,N=1,o。=9.8392,1=1.509 [3]钟斌,马莉丽.交流感应电动机精确解耦模型的自抗扰 PI-ADRGPC =0.1181,h=0.1,b=0.0022, 控制[).辽宁工程技术大学学报(自然科学版),2015, K=0.000000005,K,=0.00000001 342217-222. ZHONG Bin.MA Lili.Active disturbance rejection con- N=9,N=3,ω=8.5026,=4.5989, ADRC-GPC a-0.9985,h=0.1,b=0.0022 trol of AC asynchronous motor's precise decoupling mod- el[J].Journal of Liaoning Technical University (natural science)),2015,34(2):217-222. 35m [4]王东阳,王奔,吴桂良.基于非线性自抗扰方法的电压型 30 PL-ADRGPC ADRC-GPC 整流器直接功率控制策略仞.电测与仪表,2015,52(6): 77-81. WANG Dongyang,WANG Ben,WU Guiliang.Voltage rectifier direct power control strategy based on nonlinear 5 ADRC method[J].Electrical measurement instrumenta- 0 tion,2015,52(6:77-81. - [5]RONG Zhilin,HUANG Qing.A new PMSM speed modu- 0100200300400500600700800900 t/s lation system with sliding mode based on active-disturb- ance-rejection control[J].Journal of Central South Uni- 图16船舶航向输出响应对比 versity,2016,23(6):1406-1415. Fig.16 Ship heading output response comparison graph [6]CAO Yongfeng.ZHAO Qiangsong,YE Yongqiang,et al. 由图16得,PI-ADRGPC控制器对船舶航向 ADRC-based current control for grid-tied inverters:design, 的跟踪偏差比ADRC-GPC控制器小。经计算PI- analysis,and verification[J].IEEE transactions on industri- ADRGPC控制器控制船舶航向平均误差(每个采 al electronics,.2020,67(10):8428-8437 样点误差的绝对值除以采样点个数)为0.1219。 [7]RAMIREZ-NERIA M.MADONSKI R,SHAO S,et al. ADRC-GPC控制器控制平均误差为1.9048。所 Robust tracking in underactuated systems using flatness- 以PI-ADRGPC控制器对船舶航向的控制效果优 based ADRC with cascade observers[J].Journal of dynam- 于ADRC-GPC控制器。 ic systems,measurement,and control,2020,142(9): 091002 4结束语 [8]DAS S,SUBUDHI B.A two-degree-of-freedom internal model-based active disturbance rejection controller for a 为克服ADRC算法在大时滞系统中具有局限 wind energy conversion system[J].IEEE journal of emer- 性、PI-GPC算法在线计算量大的缺点,我们提出 ging and selected topics in power electronics,2020,8(3): 了PI-ADRGPC算法。本文利用频域法对该算法 26642671. 进行了分析。针对一阶线性系统,推导了PI-AD [9]WANG Zhen,ZHAO Jiwen,WANG Lijun,et al.Com- RGPC算法的闭环反馈结构,证明了算法的稳定 bined vector resonant and active disturbance rejection con-KE 为舵机控制增益; TE 为舵机时间常数[17]。 K = 0.478 s−1 T = 216 s α = 30 KE = 1 TE = 2.5 s 本文选择“育龙轮”为实验对象。当航速为 7.2 m/s 时,其操纵性指数为 , , ;舵机特性参数 , ,舵机的最 大舵角[18] 为 35°。 0.1 rad/s 4 ◦ 一般情况下,船舶航行过程中会受到二阶波 浪力干扰,在 200 s 之后给船施加一个频率为 ,幅值为 的等效正弦干扰,如式 (15) 所示: w(t) = 4 sin(0.1t) (15) 船舶航向控制器参数如表 5 所示。船舶航向 输出曲线如图 16 所示。 表 5 船舶航向控制器的参数 Table 5 Parameters of the ship heading controllers 控制算法 控制器参数 PI-ADRGPC N=7, Nu=1, ωo=9.839 2, λ=1.509, α=0.118 1, h=0.1, b0=0.002 2, KI=0.000 000 005, Kp=0.000 000 01 ADRC-GPC N=9, Nu=3, ωo=8.502 6, λ=4.598 9, α=0.998 5, h=0.1, b0=0.002 2 0 100 200 300 400 500 600 700 800 900 −5 0 5 10 15 20 25 30 35 PI-ADRGPC ADRC-GPC ψd ψ/(°) t/s 图 16 船舶航向输出响应对比 Fig. 16 Ship heading output response comparison graph 由图 16 得,PI-ADRGPC 控制器对船舶航向 的跟踪偏差比 ADRC-GPC 控制器小。经计算 PIADRGPC 控制器控制船舶航向平均误差 (每个采 样点误差的绝对值除以采样点个数) 为 0.121 9。 ADRC-GPC 控制器控制平均误差为 1.904 8。所 以 PI-ADRGPC 控制器对船舶航向的控制效果优 于 ADRC-GPC 控制器。 4 结束语 为克服 ADRC 算法在大时滞系统中具有局限 性、PI-GPC 算法在线计算量大的缺点,我们提出 了 PI-ADRGPC 算法。本文利用频域法对该算法 进行了分析。针对一阶线性系统,推导了 PI-ADRGPC 算法的闭环反馈结构,证明了算法的稳定 性;利用开环传递函数的频域特性,分析了参数 变化对 PI-ADRGPC 性能的影响;将所提出的算法 应用于一阶线性系统和船舶航向控制系统,验证 了算法的性能。仿真结果显示,所提出的算法和 传统 ADRC 和 ADRC-GPC 算法相比具有更快的 响应速度和更短的调节时间。在未来,我们将继 续提高算法的性能并加以推广。 参考文献: 韩京清. 自抗扰控制技术: 估计补偿不确定因素的控制 技术 [M]. 北京: 国防工业出版社, 2008. [1] 韩京清. 反馈系统中的线性与非线性 [J]. 控制与决策, 1988(2): 27–32, 65. HAN Jingqing. Linearity and nonlinearity in feedback systems[J]. Control and decision, 1988(2): 27–32, 65. [2] 钟斌, 马莉丽. 交流感应电动机精确解耦模型的自抗扰 控制 [J]. 辽宁工程技术大学学报 (自然科学版), 2015, 34(2): 217–222. ZHONG Bin, MA Lili. Active disturbance rejection control of AC asynchronous motor’s precise decoupling model[J]. Journal of Liaoning Technical University (natural science), 2015, 34(2): 217–222. [3] 王东阳, 王奔, 吴桂良. 基于非线性自抗扰方法的电压型 整流器直接功率控制策略 [J]. 电测与仪表, 2015, 52(6): 77–81. WANG Dongyang, WANG Ben, WU Guiliang. Voltage rectifier direct power control strategy based on nonlinear ADRC method[J]. Electrical measurement & instrumentation, 2015, 52(6): 77–81. [4] RONG Zhilin, HUANG Qing. A new PMSM speed modulation system with sliding mode based on active-disturbance- rejection control[J]. Journal of Central South University, 2016, 23(6): 1406–1415. [5] CAO Yongfeng, ZHAO Qiangsong, YE Yongqiang, et al. ADRC-based current control for grid-tied inverters: design, analysis, and verification[J]. IEEE transactions on industrial electronics, 2020, 67(10): 8428–8437. [6] RAMIREZ-NERIA M, MADONSKI R, SHAO S, et al. Robust tracking in underactuated systems using flatnessbased ADRC with cascade observers[J]. Journal of dynamic systems, measurement, and control, 2020, 142(9): 091002. [7] DAS S, SUBUDHI B. A two-degree-of-freedom internal model-based active disturbance rejection controller for a wind energy conversion system[J]. IEEE journal of emerging and selected topics in power electronics, 2020, 8(3): 2664–2671. [8] WANG Zhen, ZHAO Jiwen, WANG Lijun, et al. Combined vector resonant and active disturbance rejection con- [9] 第 1 期 任佳,等:PI 型自抗扰广义预测控制的性能分析 ·73·