正在加载图片...
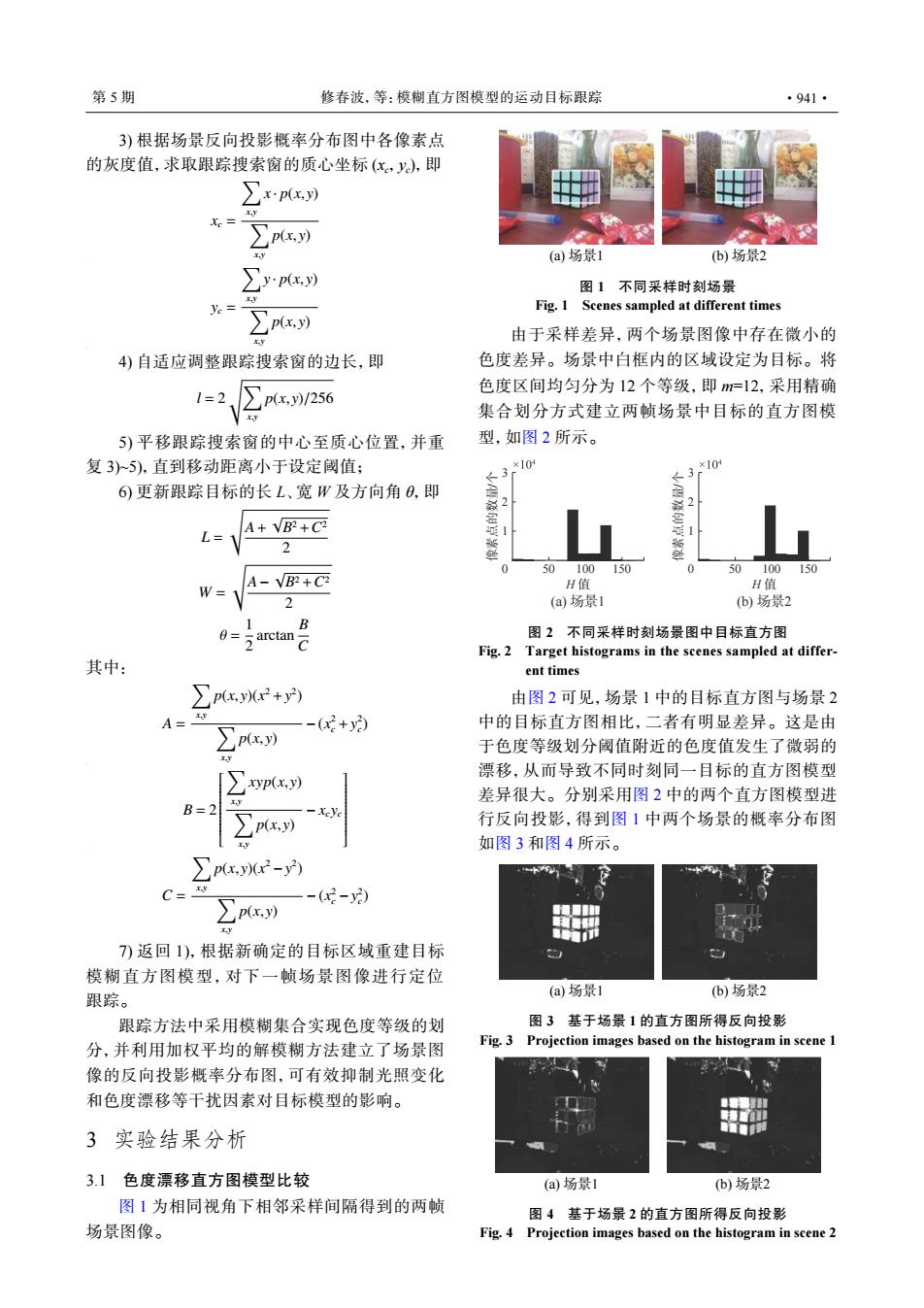
第5期 修春波,等:模糊直方图模型的运动目标跟踪 ·941· 3)根据场景反向投影概率分布图中各像素点 的灰度值,求取跟踪搜索窗的质心坐标(x,),即 ∑xpx,0 Xc= (a)场景1 b)场景2 ∑W 图1不同采样时刻场景 ye= Fig.1 Scenes sampled at different times ∑pxy 由于采样差异,两个场景图像中存在微小的 4)自适应调整跟踪搜索窗的边长,即 色度差异。场景中白框内的区域设定为目标。将 色度区间均匀分为12个等级,即m=12,采用精确 1=2 px,y)/256 集合划分方式建立两帧场景中目标的直方图模 5)平移跟踪搜索窗的中心至质心位置,并重 型,如图2所示。 复3)5),直到移动距离小于设定阈值: ×10时 3 ×10 3 6)更新跟踪目标的长L、宽W及方向角O,即 2 A+VB2+C2 L= 1 乘1 2 0 50100150 50100150 A-VB2+C2 W=1 H值 H值 2 (a)场景1 (b)场景2 1 B 0=arctan C 图2不同采样时刻场景图中目标直方图 Fig.2 Target histograms in the scenes sampled at differ- 其中: ent times ∑pxx2+y) 由图2可见,场景1中的目标直方图与场景2 I.V A= -(x+y) 中的目标直方图相比,二者有明显差异。这是由 于色度等级划分阈值附近的色度值发生了微弱的 ∑p, 漂移,从而导致不同时刻同一目标的直方图模型 差异很大。分别采用图2中的两个直方图模型进 B=2 ∑px,y 行反向投影,得到图1中两个场景的概率分布图 如图3和图4所示。 ∑px-y) C= ∑P -(2-y2) 7)返回1),根据新确定的目标区域重建目标 模糊直方图模型,对下一帧场景图像进行定位 跟踪。 (a)场景1 b)场景2 跟踪方法中采用模糊集合实现色度等级的划 图3。基于场景1的直方图所得反向投影 分,并利用加权平均的解模糊方法建立了场景图 Fig.3 Projection images based on the histogram in scene 1 像的反向投影概率分布图,可有效抑制光照变化 和色度漂移等干扰因素对目标模型的影响。 3实验结果分析 3.1色度漂移直方图模型比较 (a)场景1 b)场景2 图1为相同视角下相邻采样间隔得到的两帧 图4基于场景2的直方图所得反向投影 场景图像。 Fig.4 Projection images based on the histogram in scene 23) 根据场景反向投影概率分布图中各像素点 的灰度值,求取跟踪搜索窗的质心坐标 (xc,yc ),即 xc = ∑ x,y x · p(x, y) ∑ x,y p(x, y) yc = ∑ x,y y · p(x, y) ∑ x,y p(x, y) 4) 自适应调整跟踪搜索窗的边长,即 l = 2 √∑ x,y p(x, y)/256 5) 平移跟踪搜索窗的中心至质心位置,并重 复 3)~5),直到移动距离小于设定阈值; 6) 更新跟踪目标的长 L、宽 W 及方向角 θ,即 L = √ A+ √ B2 +C2 2 W = √ A− √ B2 +C2 2 θ = 1 2 arctan B C 其中: A = ∑ x,y p(x, y)(x 2 +y 2 ) ∑ x,y p(x, y) −(x 2 c +y 2 c ) B = 2 ∑ x,y xyp(x, y) ∑ x,y p(x, y) − xcyc C = ∑ x,y p(x, y)(x 2 −y 2 ) ∑ x,y p(x, y) −(x 2 c −y 2 c ) 7) 返回 1),根据新确定的目标区域重建目标 模糊直方图模型,对下一帧场景图像进行定位 跟踪。 跟踪方法中采用模糊集合实现色度等级的划 分,并利用加权平均的解模糊方法建立了场景图 像的反向投影概率分布图,可有效抑制光照变化 和色度漂移等干扰因素对目标模型的影响。 3 实验结果分析 3.1 色度漂移直方图模型比较 图 1 为相同视角下相邻采样间隔得到的两帧 场景图像。 (a) 场景1 (b) 场景2 图 1 不同采样时刻场景 Fig. 1 Scenes sampled at different times 由于采样差异,两个场景图像中存在微小的 色度差异。场景中白框内的区域设定为目标。将 色度区间均匀分为 12 个等级,即 m=12,采用精确 集合划分方式建立两帧场景中目标的直方图模 型,如图 2 所示。 50 100 150 H 值 2 1 0 像素点的数量/个 (a) 场景1 50 100 150 H 值 2 1 0 像素点的数量/个 (b) 场景2 3 3 图 2 不同采样时刻场景图中目标直方图 Fig. 2 Target histograms in the scenes sampled at different times 由图 2 可见,场景 1 中的目标直方图与场景 2 中的目标直方图相比,二者有明显差异。这是由 于色度等级划分阈值附近的色度值发生了微弱的 漂移,从而导致不同时刻同一目标的直方图模型 差异很大。分别采用图 2 中的两个直方图模型进 行反向投影,得到图 1 中两个场景的概率分布图 如图 3 和图 4 所示。 (a) 场景1 (b) 场景2 图 3 基于场景 1 的直方图所得反向投影 Fig. 3 Projection images based on the histogram in scene 1 (a) 场景1 (b) 场景2 图 4 基于场景 2 的直方图所得反向投影 Fig. 4 Projection images based on the histogram in scene 2 第 5 期 修春波,等:模糊直方图模型的运动目标跟踪 ·941·