正在加载图片...
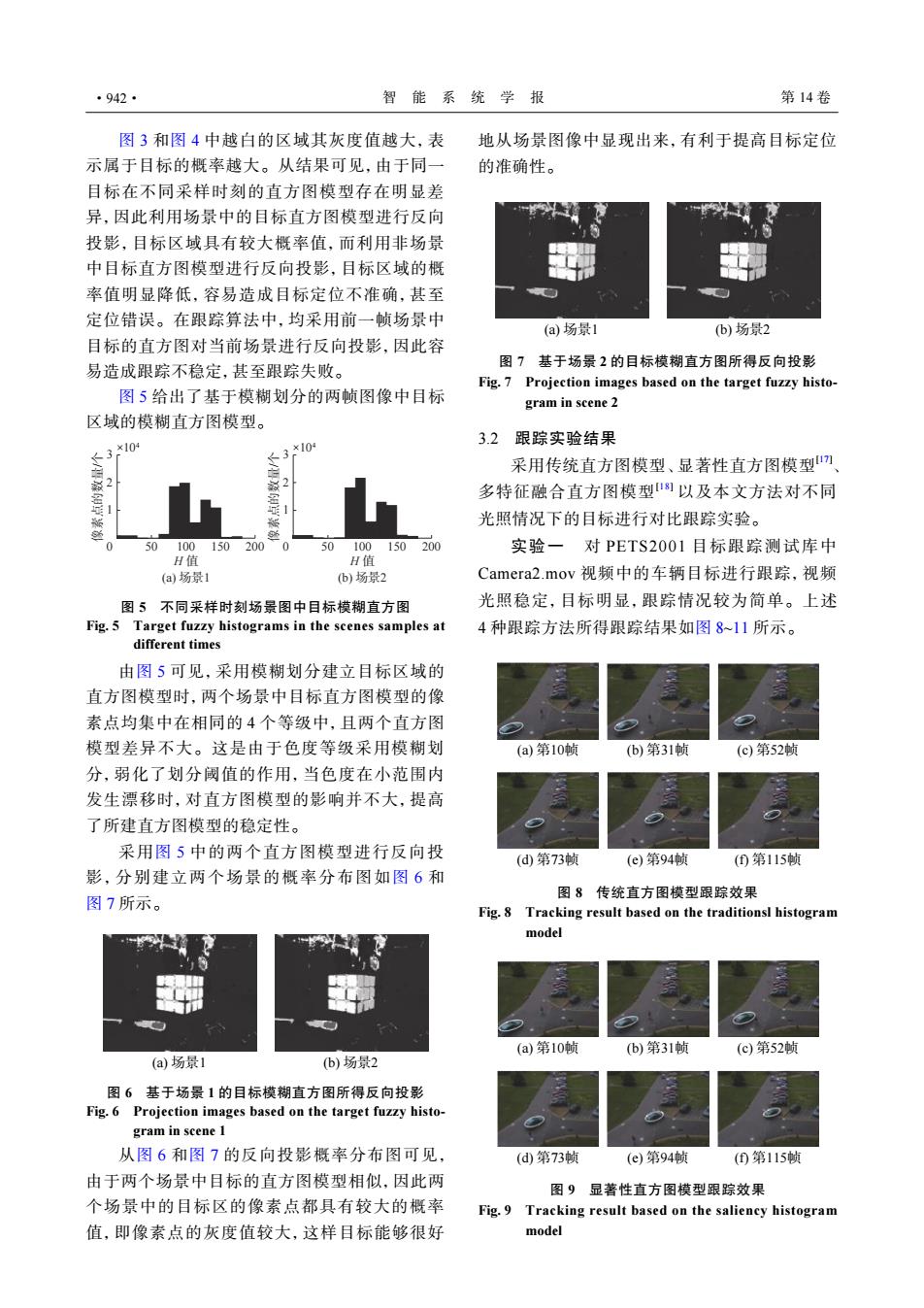
·942· 智能系统学报 第14卷 图3和图4中越白的区域其灰度值越大,表 地从场景图像中显现出来,有利于提高目标定位 示属于目标的概率越大。从结果可见,由于同一 的准确性。 目标在不同采样时刻的直方图模型存在明显差 异,因此利用场景中的目标直方图模型进行反向 投影,目标区域具有较大概率值,而利用非场景 中目标直方图模型进行反向投影,目标区域的概 率值明显降低,容易造成目标定位不准确,甚至 定位错误。在跟踪算法中,均采用前一帧场景中 (a)场景1 (b)场景2 目标的直方图对当前场景进行反向投影,因此容 易造成跟踪不稳定,甚至跟踪失败。 图7基于场景2的目标模糊直方图所得反向投影 Fig.7 Projection images based on the target fuzzy histo- 图5给出了基于模糊划分的两帧图像中目标 gram in scene 2 区域的模糊直方图模型。 3.2跟踪实验结果 ×104 3 采用传统直方图模型、显著性直方图模型刀 多特征融合直方图模型1以及本文方法对不同 光照情况下的目标进行对比跟踪实验。 0 501001502000 50100150200 实验一对PETS2001目标跟踪测试库中 H值 H值 (a场景1 (b)场景2 Camera2.mov视频中的车辆目标进行跟踪,视频 图5不同采样时刻场景图中目标模糊直方图 光照稳定,目标明显,跟踪情况较为简单。上述 Fig.5 Target fuzzy histograms in the scenes samples at 4种跟踪方法所得跟踪结果如图8~11所示。 different times 由图5可见,采用模糊划分建立目标区域的 直方图模型时,两个场景中目标直方图模型的像 素点均集中在相同的4个等级中,且两个直方图 模型差异不大。这是由于色度等级采用模糊划 (a)第10帧 (b)第31帧 (c)第52帧 分,弱化了划分阈值的作用,当色度在小范围内 发生漂移时,对直方图模型的影响并不大,提高 了所建直方图模型的稳定性。 采用图5中的两个直方图模型进行反向投 (d第73帧 (e)第94帧 (①第115帧 影,分别建立两个场景的概率分布图如图6和 图8传统直方图模型跟踪效果 图7所示。 Fig.8 Tracking result based on the traditionsl histogram model (a)第10帧 (b)第31帧 (c)第52帧 (a)场景1 (b)场景2 图6基于场景1的目标模糊直方图所得反向投影 Fig.6 Projection images based on the target fuzzy histo- gram in scene 1 从图6和图7的反向投影概率分布图可见 (d)第73帧 (e)第94帧 ()第115帧 由于两个场景中目标的直方图模型相似,因此两 图9显著性直方图模型跟踪效果 个场景中的目标区的像素点都具有较大的概率 Fig.9 Tracking result based on the saliency histogram 值,即像素点的灰度值较大,这样目标能够很好 model图 3 和图 4 中越白的区域其灰度值越大,表 示属于目标的概率越大。从结果可见,由于同一 目标在不同采样时刻的直方图模型存在明显差 异,因此利用场景中的目标直方图模型进行反向 投影,目标区域具有较大概率值,而利用非场景 中目标直方图模型进行反向投影,目标区域的概 率值明显降低,容易造成目标定位不准确,甚至 定位错误。在跟踪算法中,均采用前一帧场景中 目标的直方图对当前场景进行反向投影,因此容 易造成跟踪不稳定,甚至跟踪失败。 图 5 给出了基于模糊划分的两帧图像中目标 区域的模糊直方图模型。 50 100 150 200 H 值 2 1 0 像素点的数量/个 (a) 场景1 ×104 3 50 100 200 ×104 150 H 值 2 1 0 像素点的数量/个 (b) 场景2 3 图 5 不同采样时刻场景图中目标模糊直方图 Fig. 5 Target fuzzy histograms in the scenes samples at different times 由图 5 可见,采用模糊划分建立目标区域的 直方图模型时,两个场景中目标直方图模型的像 素点均集中在相同的 4 个等级中,且两个直方图 模型差异不大。这是由于色度等级采用模糊划 分,弱化了划分阈值的作用,当色度在小范围内 发生漂移时,对直方图模型的影响并不大,提高 了所建直方图模型的稳定性。 采用图 5 中的两个直方图模型进行反向投 影,分别建立两个场景的概率分布图如图 6 和 图 7 所示。 (a) 场景1 (b) 场景2 图 6 基于场景 1 的目标模糊直方图所得反向投影 Fig. 6 Projection images based on the target fuzzy histogram in scene 1 从图 6 和图 7 的反向投影概率分布图可见, 由于两个场景中目标的直方图模型相似,因此两 个场景中的目标区的像素点都具有较大的概率 值,即像素点的灰度值较大,这样目标能够很好 地从场景图像中显现出来,有利于提高目标定位 的准确性。 (a) 场景1 (b) 场景2 图 7 基于场景 2 的目标模糊直方图所得反向投影 Fig. 7 Projection images based on the target fuzzy histogram in scene 2 3.2 跟踪实验结果 采用传统直方图模型、显著性直方图模型[17] 、 多特征融合直方图模型[18] 以及本文方法对不同 光照情况下的目标进行对比跟踪实验。 实验一 对 PETS2001 目标跟踪测试库中 Camera2.mov 视频中的车辆目标进行跟踪,视频 光照稳定,目标明显,跟踪情况较为简单。上述 4 种跟踪方法所得跟踪结果如图 8~11 所示。 (a) 第10帧 (b) 第31帧 (c) 第52帧 (d) 第73帧 (e) 第94帧 (f) 第115帧 图 8 传统直方图模型跟踪效果 Fig. 8 Tracking result based on the traditionsl histogram model (a) 第10帧 (b) 第31帧 (c) 第52帧 (d) 第73帧 (e) 第94帧 (f) 第115帧 图 9 显著性直方图模型跟踪效果 Fig. 9 Tracking result based on the saliency histogram model ·942· 智 能 系 统 学 报 第 14 卷