正在加载图片...
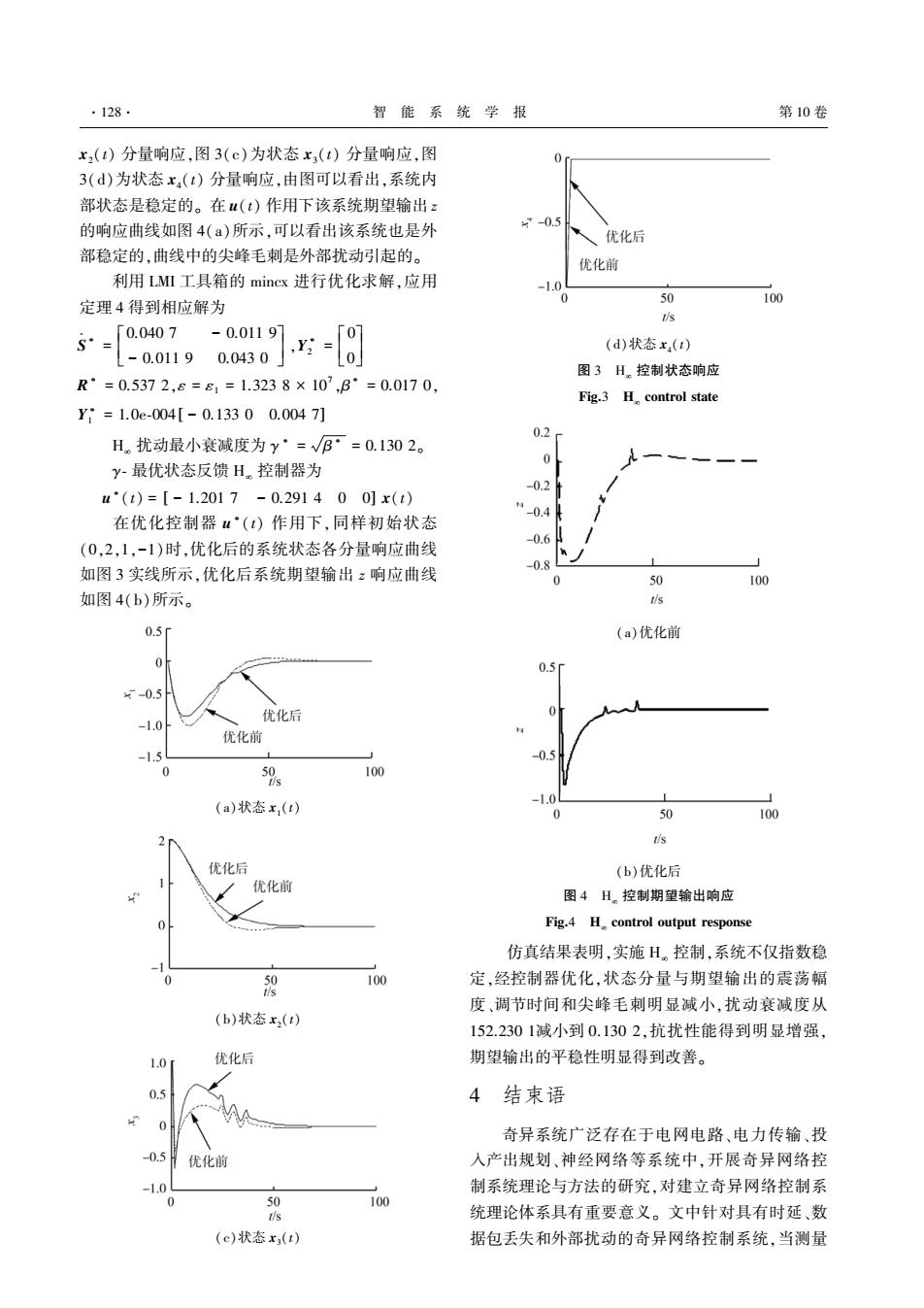
·128 智能系统学报 第10卷 x2(t)分量响应,图3(c)为状态x(t)分量响应,图 3(d)为状态x,(t)分量响应,由图可以看出,系统内 部状态是稳定的。在u(t)作用下该系统期望输出z 的响应曲线如图4(a)所示,可以看出该系统也是外 *-0.5 优化后 部稳定的,曲线中的尖峰毛刺是外部扰动引起的。 优化前 利用LM工具箱的mincx进行优化求解,应用 -1.00 定理4得到相应解为 0 50 100 tis S 「0.0407 -0.0119] 01 -0.01190.0430J ,= 0 (d)状态x,(t) 图3H.控制状态响应 R°=0.5372,e=61=1.3238×10,B°=0.0170, Fig.3 H control state Y=1.0e-004[-0.13300.0047] 0.2 H扰动最小衰减度为y·=√B°=0.1302。 y最优状态反馈H控制器为 u(t)=[-1.2017-0.291400]x(t) 0.2卡 在优化控制器“·(t)作用下,同样初始状态 -0.4 (0,2,1,-1)时,优化后的系统状态各分量响应曲线 -0.64 如图3实线所示,优化后系统期望输出:响应曲线 -0.8 0 50 100 如图4(b)所示。 tis 0.5 (a)优化前 0.5f -0.5 优化后 -1.0F 优化前 -1.5 -0.5 0 职 100 1.0 (a)状态x,(t) 50 100 tis 优化后 (b)优化后 优化前 图4H,控制期望输出响应 Fig.4 H control output response 仿真结果表明,实施H。控制,系统不仅指数稳 0 9 100 定,经控制器优化,状态分量与期望输出的震荡幅 度、调节时间和尖峰毛刺明显减小,扰动衰减度从 (b)状态x(t) 152.2301减小到0.1302,抗扰性能得到明显增强, 1.0[ 优化后 期望输出的平稳性明显得到改善。 0.5 4结束语 A 0 奇异系统广泛存在于电网电路、电力传输、投 -0.5 优化前 入产出规划、神经网络等系统中,开展奇异网络控 -1.0 制系统理论与方法的研究,对建立奇异网络控制系 0 50 100 s 统理论体系具有重要意义。文中针对具有时延、数 (c)状态x(t) 据包丢失和外部扰动的奇异网络控制系统,当测量曾圆渊贼冤 分量响应袁图 猿渊糟冤为状态 曾猿渊贼冤 分量响应袁图 猿渊凿冤为状态 曾源渊贼冤 分量响应袁由图可以看出袁系统内 部状态是稳定的遥 在 怎渊贼冤 作用下该系统期望输出 扎 的响应曲线如图 源渊葬冤所示袁可以看出该系统也是外 部稳定的袁曲线中的尖峰毛刺是外部扰动引起的遥 利用 蕴酝陨 工具箱的 皂蚤灶糟曾 进行优化求解袁应用 定理 源 得到相应解为 杂 赞 鄢 越 园援园源园 苑 原 园援园员员 怨 原 园援园员员 怨 园援园源猿 园 ⎡ ⎣ ⎢ ⎢ ⎤ ⎦ ⎥ ⎥ 袁再鄢 圆 越 园 园 ⎡ ⎣ ⎢ ⎢ ⎤ ⎦ ⎥ ⎥ 砸鄢 越 园援缘猿苑 圆袁着 越 着员 越 员援猿圆猿 愿 伊 员园苑 袁茁鄢 越 园援园员苑 园袁 再鄢 员 越 员援园藻鄄园园源 [ ] 原 园援员猿猿 园摇 园援园园源 苑 摇摇匀∞ 扰动最小衰减度为 酌 鄢 越 茁 鄢 越 园援员猿园 圆遥 酌 鄄 最优状态反馈 匀∞ 控制器为 怎鄢渊贼冤 越 原[ ] 员援圆园员 苑 原 园援圆怨员 源 园 园 曾渊贼冤 摇 摇 在优化控制器 怎鄢渊贼冤 作用下袁同样初始状态 渊园袁圆袁员袁原员冤时袁优化后的系统状态各分量响应曲线 如图 猿 实线所示袁优化后系统期望输出 扎 响应曲线 如图 源渊遭冤所示遥 渊葬冤状态 曾员渊贼冤 渊遭冤状态 曾圆渊贼冤 渊糟冤状态 曾猿渊贼冤 渊凿冤状态 曾源渊贼冤 图 猿摇 匀∞ 控制状态响应 云蚤早援猿摇 匀∞ 糟燥灶贼则燥造 泽贼葬贼藻 渊葬冤优化前 渊遭冤优化后 图 源摇 匀∞ 控制期望输出响应 云蚤早援源摇 匀∞ 糟燥灶贼则燥造 燥怎贼责怎贼 则藻泽责燥灶泽藻 仿真结果表明袁实施 匀∞ 控制袁系统不仅指数稳 定袁经控制器优化袁状态分量与期望输出的震荡幅 度尧调节时间和尖峰毛刺明显减小袁扰动衰减度从 员缘圆援圆猿园 员减小到 园援员猿园 圆袁抗扰性能得到明显增强袁 期望输出的平稳性明显得到改善遥 源摇 结束语 奇异系统广泛存在于电网电路尧电力传输尧投 入产出规划尧神经网络等系统中袁开展奇异网络控 制系统理论与方法的研究袁对建立奇异网络控制系 统理论体系具有重要意义遥 文中针对具有时延尧数 据包丢失和外部扰动的奇异网络控制系统袁当测量 窑员圆愿窑 智 能 系 统 学 报摇摇摇摇摇摇摇摇摇摇摇摇摇摇摇摇摇摇 第 员园 卷