正在加载图片...
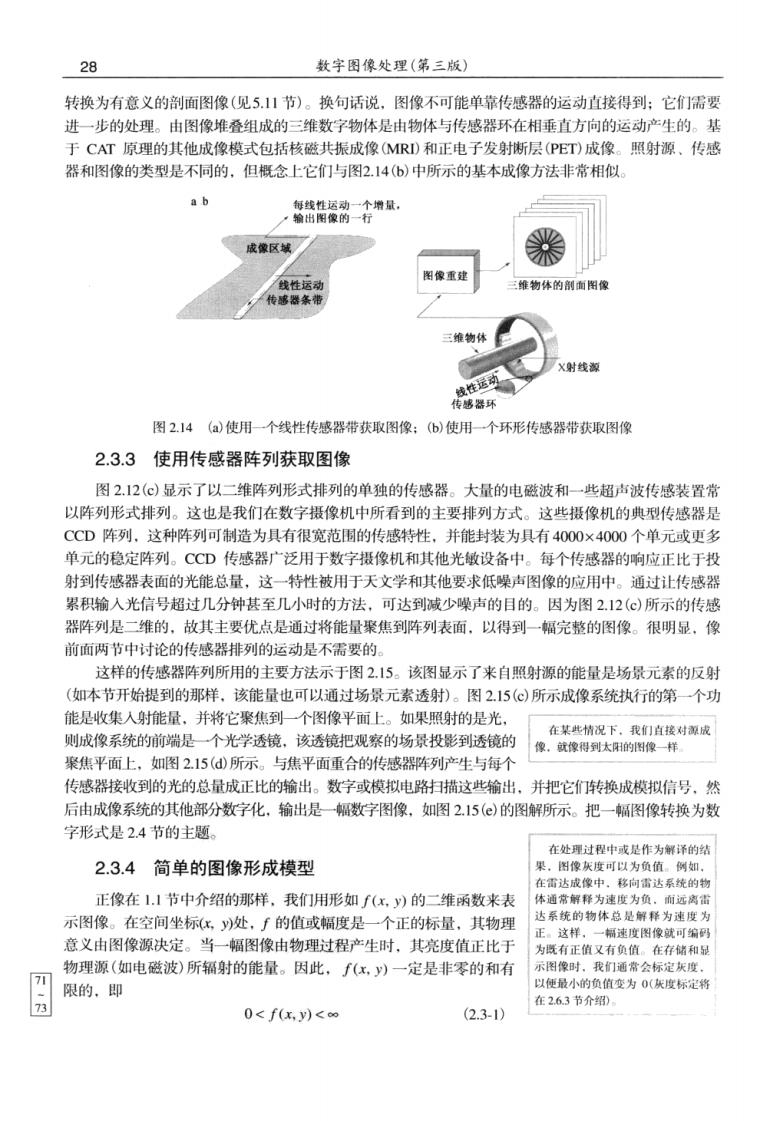
28 数字图像处理(第三版) 转换为有意义的剖面图像(见5.11节)。换句话说,图像不可能单靠传感器的运动直接得到:它们需要 进一步的处理。由图像堆叠组成的三维数字物体是由物体与传感器环在相垂直方向的运动产生的。基 于CAT原理的其他成像模式包括核磁共振成像MR)和正电子发射断层(PET)成像。照射源、传感 器和图像的类型是不同的,但概念上它们与图2.14(6)中所示的基本成像方法非常相似 ab 图像重 传器条 三维物体的副面图像 三维物体 X射线源 器环 图2.14(a)使用一一个线性传感器带获取图像:(6)使用一个环形传感器带获取图像 2.3.3使用传感器阵列获取图像 图2.12()显示了以二维阵列形式排列的单独的传感器。大量的电磁波和一些超声波传感装置常 以阵列形式排列。这也是我们在数字摄像机中所看到的主要排列方式。这些摄像机的典型传感器是 CCD阵列,这种阵列可制造为具有很宽范围的传感特性,并能封装为具有4000×4000个单元或更多 单元的稳定阵列。CCD传感器广泛用于数字摄像机和其他光敏设备中。每个传感器的响应正比于投 射到传感器表面的光能总量,这一特性被用于天文学和其他要求低噪声图像的应用中。通过让传感器 累积输入光信号超过几分钟甚至几小时的方法,可达到减少噪声的目的。因为图2.12(©)所示的传感 器阵列是二维的,故其主要优点是通过将能量聚焦到阵列表面,以得到一幅完整的图像。很明显,像 前面两节中讨论的传感器排列的运动是不需要的。 这样的传感器阵列所用的主要方法示于图2,15。该图显示了来自照射源的能量是场景元素的反射 (如本节开始提到的那样,该能量也可以通过场景元素透射)。图2.15(@)所示成像系统执行的第一个功 能是收集人射能量,并将它聚焦到一个图像平面上。如果照身射的是光 则成像系统的前端是一个光学透镜,该透镜把观察的场景投影到透镜的 在某此情况下我们直接对源成 像。就像得到太阳的图像一样 聚焦平面上,如图2.15(d)所示。与焦平面重合的传感器阵列产生与每个 传感器接收到的光的总量成正比的输出。数字或模拟电路扫描这些输出。并把它们转换成模拟信号然 后由成像系统的其他部分数字化,输出是幅数字图像,如图2.15()的图解所示。把一幅图像转换为数 字形式是2.4节的主题。 在处理过程中成是作为解译的绍 2.3.4简单的图像形成模型 正像在1.1节中介绍的那样,我们用形如(x,y)的二维函数来表 体通常解为速度为角。面远离 示图像。在空间坐标化y处,了的值或幅度是一个正的标量,其物理 达系统的物体总是解释为速度 意义由图像源决定。当一幅图像由物理过程产生时,其亮度值正比于 物理源(如电磁波)所辐射的能量。因此,fx,y)一定是非零的和有 以使最小的负值变为0(妖度标定将 在2.63节介绍) 0<f(x.y)<oo (2.3.1)