正在加载图片...
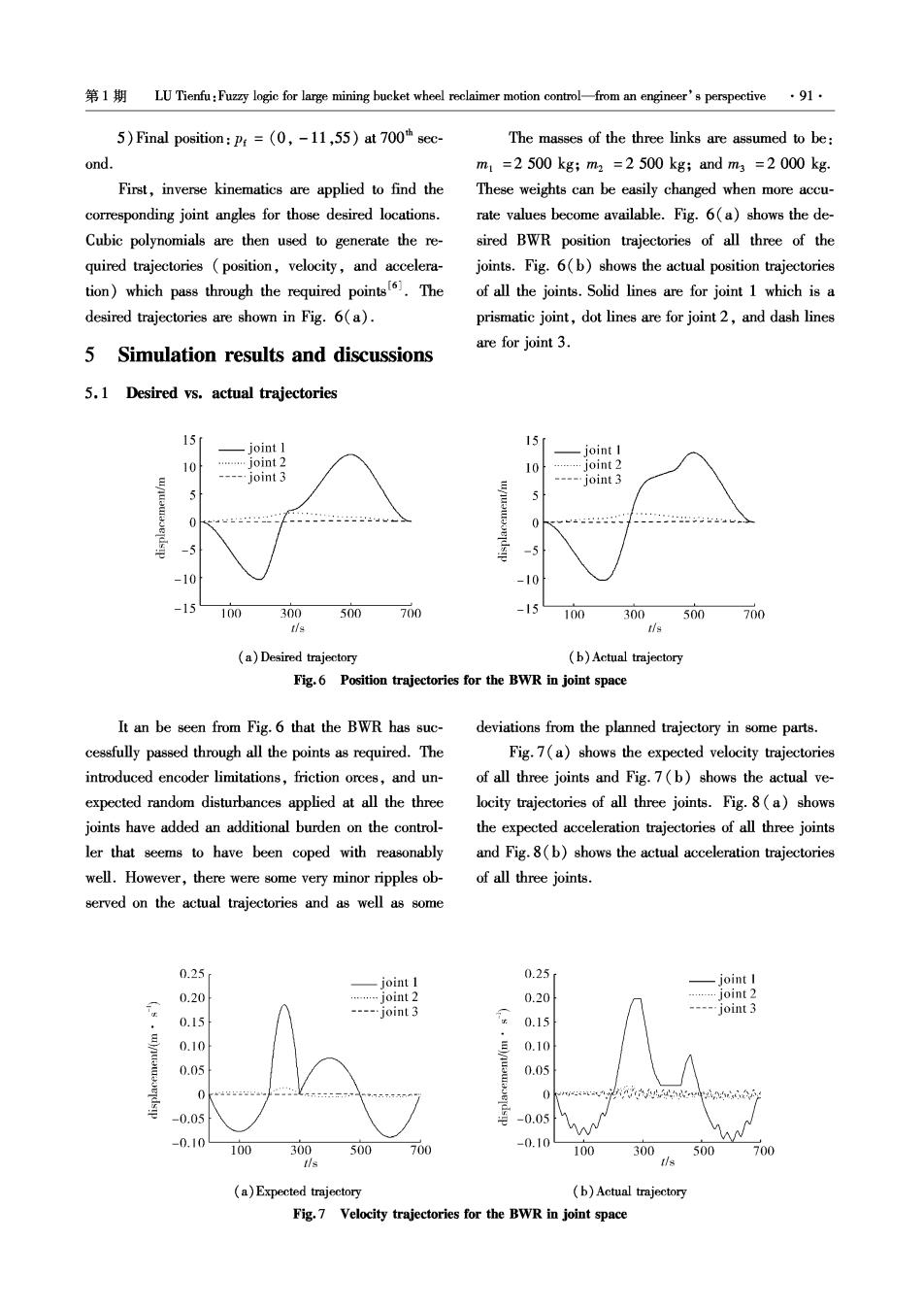
1LU Tienfu:Fuzzy logic for large mining bucket wheel reclaimer motion control-from an engineer's perspective 91. 5)Final position:Pr=(0,-11,55)at 700%h sec- The masses of the three links are assumed to be: ond. m1=2500kg;m2=2500kg;andm3=2000kg. First,inverse kinematics are applied to find the These weights can be easily changed when more accu- corresponding joint angles for those desired locations. rate values become available.Fig.6(a)shows the de- Cubic polynomials are then used to generate the re- sired BWR position trajectories of all three of the quired trajectories (position,velocity,and accelera- joints.Fig.6(b)shows the actual position trajectories tion)which pass through the required points.The of all the joints.Solid lines are for joint 1 which is a desired trajectories are shown in Fig.6(a). prismatic joint,dot lines are for joint 2,and dash lines 5 Simulation results and discussions are for joint 3. 5.1 Desired vs.actual trajectories 15 -joint 1 15 joint I 10 …j0int2 10 .…joint2 --…joint3 --=-…joint3 5 -5 10 -10 15 100 300500 700 -15 100 300500700 tis tis (a)Desired trajectory (b)Actual trajectory Fig.6 Position trajectories for the BWR in joint space It an be seen from Fig.6 that the BWR has suc- deviations from the planned trajectory in some parts cessfully passed through all the points as required.The Fig.7(a)shows the expected velocity trajectories introduced encoder limitations,friction orces,and un- of all three joints and Fig.7(b)shows the actual ve- expected random disturbances applied at all the three locity trajectories of all three joints.Fig.8(a)shows joints have added an additional burden on the control- the expected acceleration trajectories of all three joints ler that seems to have been coped with reasonably and Fig.8(b)shows the actual acceleration trajectories well.However,there were some very minor ripples ob- of all three joints. served on the actual trajectories and as well as some 0.25 -joint 1 0.25 joint I 0.20 …j0int2 0.20 …joint2 ---…joint3 ---…joint3 0.15 0.15 0.10 0.10 0.05 0.05 0 -0.05 -0.05 M 0.10 100 300 500 700 -0.10 100 300 500 700 de (a)Expected trajectory (b)Actual trajectory Fig.7 Velocity trajectories for the BWR in joint space