正在加载图片...
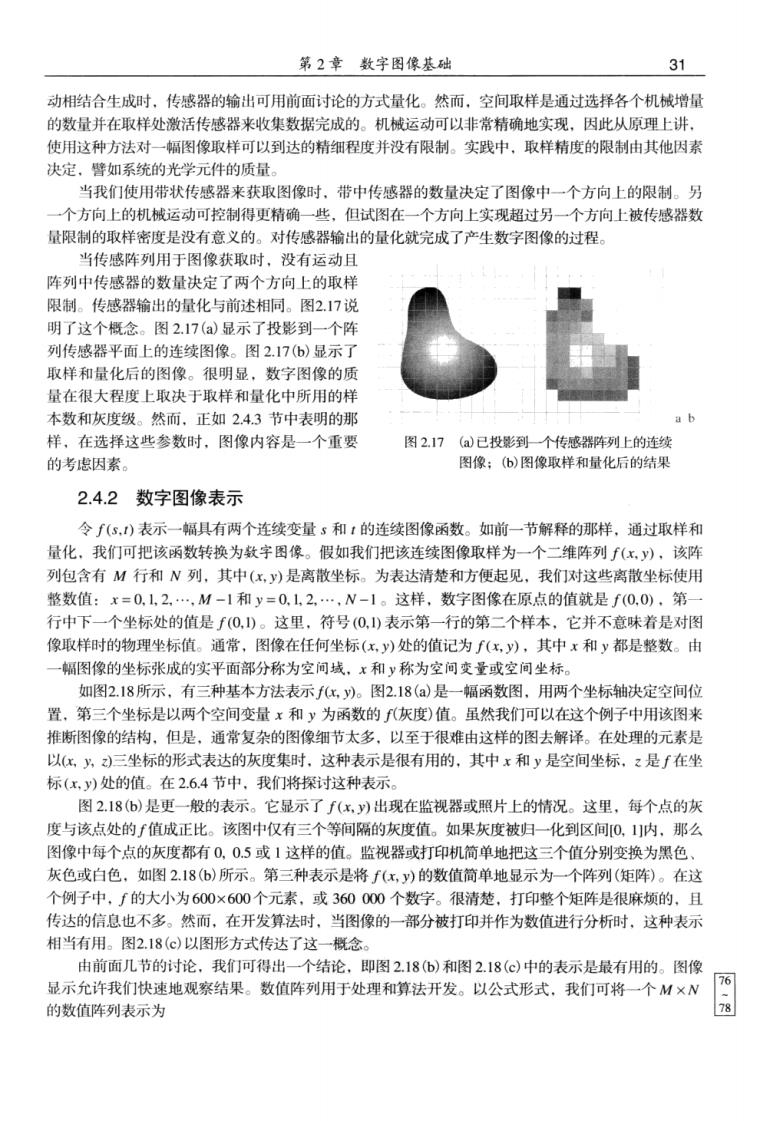
第2章数字图像基础 31 动相结合生成时.传成器的命出可用前而寸论的方式量化。然而,空间取样是通过选择客个机械增量 的数量并在取样处激活传感器来收集数据完成的。机械运动可以非常精确地实现,因此从原理上讲。 使用这种方法对一幅图像取样可以到达的精细程度并没有限制。实践中,取样精度的限制由其他因素 决定、譬如系统的光学元件的质量。 当我们使用带状传感器来获取图像时,带中传感器的数量决定了图像中一个方向上的限制。另 个方向上的机械运动可控制得更精确一些,但试图在一个方向上实现超过另一个方向上被传感器数 量限制的取样密度是没有意义的。对传感器输出的量化就完成了产生数字图像的过程。 当传感阵列用于图像获取时,没有运动目 阵列中传感器的数量决定了两个方向上的取样 限制。传感器输出的量化与前述相同。图2.17说 明了这个概念。图2.17(a)显示了投影到一个阵 列传感器平面上的连续图像。图2.17(6)显示了 取样和量化后的图像。很明显 ,数字图像的质 量在很大程度上取决于取样和量化中所用的样 本数和灰度级。姚面正如243节中表明的那 样,在选择这些参数时,图像内容是一个重要 图217(已投影到一个传越器阵列上的连 的考虑因素。 图像:(b)图像取样和量化后的结果 2.4.2数字图像表示 令∫(5,)表示一幅具有两个连续变量s和1的连续图像函数。如前一节解释的那样,通过取样和 量化.我们可把该函数转换为致字图像。假如我们把该连续图像取样为一个二维阵列fx),该阵 列包含有M行和N列,其中(x,y)是离散坐标。为表达清楚和方便起见,我们对这些离散坐标使用 整数值:x=0.1.2.·.M-1和"=0.L.2.·,N-1。这样.数字图像在原点的值就是f(0.0),第- 行中下一个坐标处的值是f0,)。这里,符号(0,)表示第一行的第二个样本,它并不意味着是对图 像取样时的物理坐标值。通常,图像在任何坐标(x,y)处的值记为(x,y),其中x和y都是整数。由 幅图像的坐标张成的实平面部分称为室间域,x和y称为室间变量或空间坐标。 如图2.18所示,有三种基本方法表示f化y)。图2.18()是一幅函数图,用两个坐标轴决定空间位 置,第三个坐标是以两个空间变量x和为函数的武灰度)值。虽然我们可以在这个例子中用该图来 推断图像的结构但是,通常复杂的图像细节太多,以至于很难由这样的图去解译。在处理的元素是 以(x,x)三坐标的形式表达的灰度集时,这种表示是很有用的,其中x和y是空间坐标,2是∫在坐 标(x,y)处的值。在2.6.4节中,我们将探讨这种表示 图2.18(b)是更一般的表示。它显示了f(x,y)出现在监视器或照片上的情况。这里,每个点的灰 度与该点处的f值成正比。该图中仅有三个等间隔的灰度值。如果灰度被归一化到区间0,内,那么 图像中每个点的灰度都有0,0.5或1这样的值。监视器或打印机简单地把这三个值分别变换为黑色、 灰色或白色,如图2.18(6)所示。第三种表示是将fx,y)的数值简单地显示为一个阵列(矩阵)。在这 个例子中,∫的大小为600×600个元素,或360000个数字。很清楚,打印整个矩阵是很麻烦的,且 传达的信息也不多。然而,在开发算法时,当图像的一部分被打印并作为数值进行分析时,这种表示 相当有用。图218()以图形方式传大了放唇令 由前面几节的讨论,我1可得出一个结论,即图2.18(b)和图2.18()中的表示是最有用的。图像 品示允许我们快速地观察结果。数值阵列用于处理和算法开发。以公式形式。我们可将一个M×N网 的数值阵列表示为