正在加载图片...
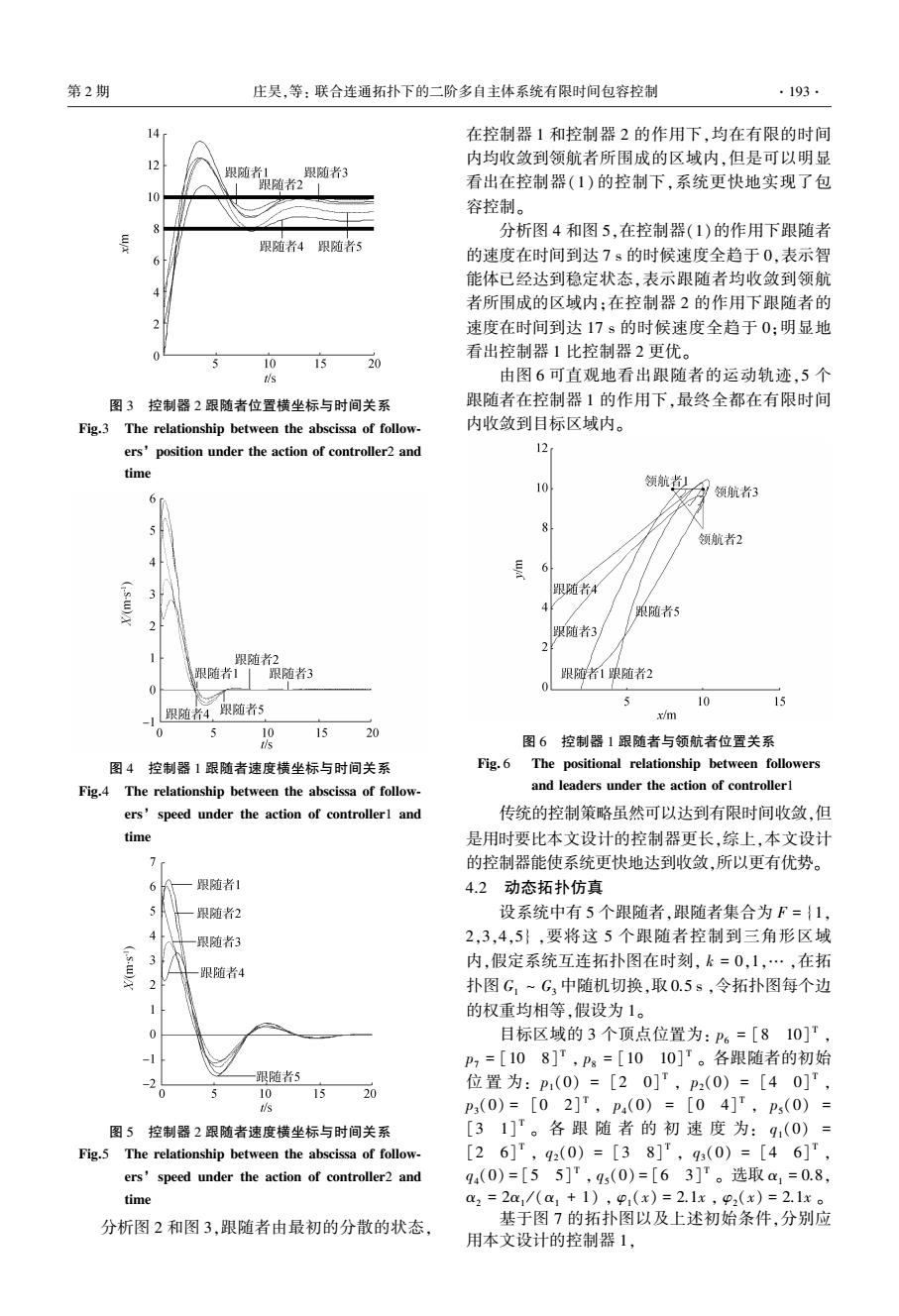
第2期 庄吴,等:联合连通拓扑下的二阶多自主体系统有限时间包容控制 .193, 14 在控制器1和控制器2的作用下,均在有限的时间 内均收敛到领航者所围成的区域内,但是可以明显 跟随者 跟随者3 跟随者2 看出在控制器(1)的控制下,系统更快地实现了包 10 容控制。 分析图4和图5,在控制器(1)的作用下跟随者 跟随者4跟随者5 的速度在时间到达7s的时候速度全趋于0,表示智 能体已经达到稳定状态,表示跟随者均收敛到领航 者所围成的区域内:在控制器2的作用下跟随者的 速度在时间到达17s的时候速度全趋于0:明显地 101520 看出控制器1比控制器2更优。 於 由图6可直观地看出跟随者的运动轨迹,5个 图3控制器2跟随者位置横坐标与时间关系 跟随者在控制器1的作用下,最终全都在有限时间 Fig.3 The relationship between the abscissa of follow- 内收敛到目标区域内。 ers'position under the action of controller2 and 12 time 10 领航者) 分领航者3 5 领航者2 6 跟随者4 4 踉随者5 跟随者3 3 跟随者2 跟随者1跟随者3 跟随者1跟随者2 跟随者4跟随者5 5 10 15 x/m 0 5 1520 图6控制器1跟随者与领航者位置关系 图4控制器1跟随者速度横坐标与时间关系 Fig.6 The positional relationship between followers Fig.4 The relationship between the abscissa of follow- and leaders under the action of controllerl ers'speed under the action of controllerl and 传统的控制策略虽然可以达到有限时间收敛,但 time 是用时要比本文设计的控制器更长,综上,本文设计 的控制器能使系统更快地达到收敛,所以更有优势。 跟随者1 4.2动态拓扑仿真 跟随者2 设系统中有5个跟随者,跟随者集合为F={1, 4 跟随者3 2,3,4,5},要将这5个跟随者控制到三角形区域 3 内,假定系统互连拓扑图在时刻,k=0,1,…,在拓 跟随者4 2 扑图G~G3中随机切换,取0.5s,令拓扑图每个边 的权重均相等,假设为1。 0 目标区域的3个顶点位置为:P6=[810]r, P,=[108]T,P=[1010]T。各跟随者的初始 -跟随者5 15 20 位置为:P(0)=[20]T,P2(0)=[40]T, 10 P(0)=[02]T,p4(0)=[04]T,P(0)= 图5控制器2跟随者速度横坐标与时间关系 [31]。各跟随者的初速度为:9(0)= Fig.5 The relationship between the abscissa of follow- [26]T,92(0)=[38],93(0)=[46]T, ers'speed under the action of controller2 and 9.(0)=[55]T,95(0)=[63]。选取a1=0.8, time a2=2a1/(a1+1),9(x)=2.1x,p2(x)=2.1x。 分析图2和图3,跟随者由最初的分散的状态, 基于图7的拓扑图以及上述初始条件,分别应 用本文设计的控制器1,图 3 控制器 2 跟随者位置横坐标与时间关系 Fig.3 The relationship between the abscissa of follow⁃ ers’ position under the action of controller2 and time 图 4 控制器 1 跟随者速度横坐标与时间关系 Fig.4 The relationship between the abscissa of follow⁃ ers’ speed under the action of controller1 and time 图 5 控制器 2 跟随者速度横坐标与时间关系 Fig.5 The relationship between the abscissa of follow⁃ ers’ speed under the action of controller2 and time 分析图 2 和图 3,跟随者由最初的分散的状态, 在控制器 1 和控制器 2 的作用下,均在有限的时间 内均收敛到领航者所围成的区域内,但是可以明显 看出在控制器(1)的控制下,系统更快地实现了包 容控制。 分析图 4 和图 5,在控制器(1)的作用下跟随者 的速度在时间到达 7 s 的时候速度全趋于 0,表示智 能体已经达到稳定状态,表示跟随者均收敛到领航 者所围成的区域内;在控制器 2 的作用下跟随者的 速度在时间到达 17 s 的时候速度全趋于 0;明显地 看出控制器 1 比控制器 2 更优。 由图 6 可直观地看出跟随者的运动轨迹,5 个 跟随者在控制器 1 的作用下,最终全都在有限时间 内收敛到目标区域内。 图 6 控制器 1 跟随者与领航者位置关系 Fig. 6 The positional relationship between followers and leaders under the action of controller1 传统的控制策略虽然可以达到有限时间收敛,但 是用时要比本文设计的控制器更长,综上,本文设计 的控制器能使系统更快地达到收敛,所以更有优势。 4.2 动态拓扑仿真 设系统中有 5 个跟随者,跟随者集合为 F = {1, 2,3,4,5} ,要将这 5 个跟随者控制到三角形区域 内,假定系统互连拓扑图在时刻, k = 0,1,… ,在拓 扑图 G1 ~ G3 中随机切换,取 0.5 s ,令拓扑图每个边 的权重均相等,假设为 1。 目标区域的 3 个顶点位置为: p6 = [8 10] T , p7 = [10 8] T , p8 = [10 10] T 。 各跟随者的初始 位 置 为: p1(0) = [2 0] T , p2(0) = [4 0] T , p3(0) = [0 2] T , p4(0) = [0 4] T , p5(0) = [3 1] T 。 各 跟 随 者 的 初 速 度 为: q1(0) = [2 6] T , q2(0) = [3 8] T , q3(0) = [4 6] T , q4(0) = [5 5] T , q5(0) = [6 3] T 。 选取 α1 = 0.8, α2 = 2α1 / (α1 + 1) , φ1(x) = 2.1x , φ2(x) = 2.1x 。 基于图 7 的拓扑图以及上述初始条件,分别应 用本文设计的控制器 1, 第 2 期 庄昊,等: 联合连通拓扑下的二阶多自主体系统有限时间包容控制 ·193·