正在加载图片...
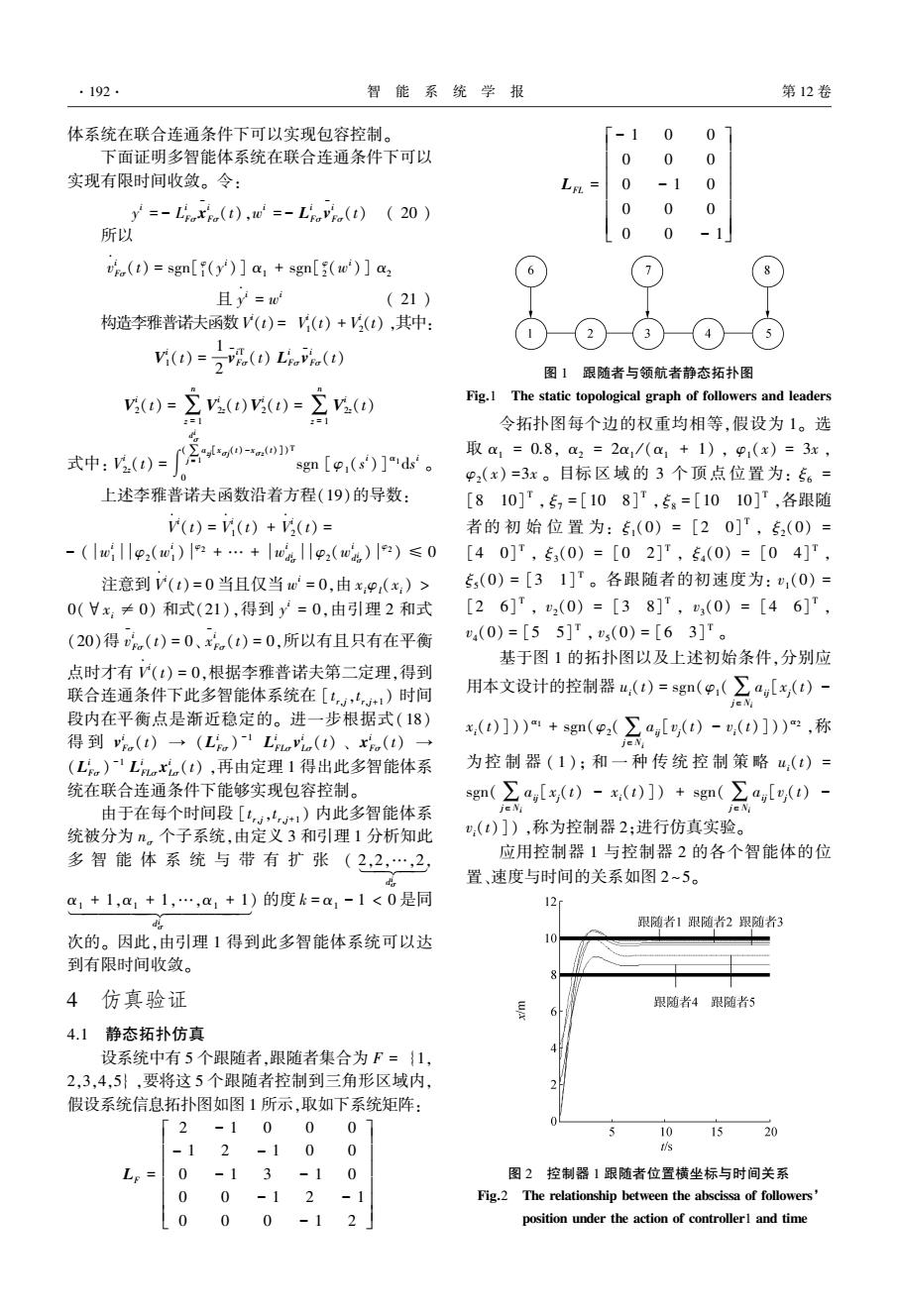
.192 智能系统学报 第12卷 体系统在联合连通条件下可以实现包容控制。 0 下面证明多智能体系统在联合连通条件下可以 实现有限时间收敛。令: 0 yi=-Lixe(t),wi=-Lrovre(t)20) 所以 vr(t)=sgn[(yi)a+sgn[(w)a2 且y=w (21) 构造李雅普诺夫函数V(t)=(t)+(t),其中: n0)=20L(0 图1跟随者与领航者静态拓扑图 r()=立()()= o Fig.1 The static topological graph of followers and leaders 令拓扑图每个边的权重均相等,假设为1。选 个a0-ao 取a1=0.8,a2=2a1/(a1+1),P(x)=3x, 式中:V(t)= sgm[p(s)]ds。 P,(x)=3x。目标区域的3个顶点位置为:专6= 上述李雅普诺夫函数沿着方程(19)的导数: [810],,=[108],专8=[1010]',各跟随 (t)=(t)+(t)= 者的初始位置为:专,(0)=[20]T,专,(0)= -(|wIp2(wi)|2+…+w6|p2(wd))≤0 [40]r,5(0)=[02]T,(0)=[04]r, 注意到V(t)=0当且仅当w=0,由x:P,(x:)> 专(0)=[31]”。各跟随者的初速度为:,(0)= 0(Hx,≠0)和式(21),得到y=0,由引理2和式 [26],2(0)=[38]',(0)=[46], (20)得m(t)=0、x(t)=0,所以有且只有在平衡 ,(0)=[55]r,,(0)=[63]T。 基于图1的拓扑图以及上述初始条件,分别应 点时才有V(t)=0,根据李雅普诺夫第二定理,得到 联合连通条件下此多智能体系统在[1,,4,+)时间 用本文设计的控制器u,(t)=sgn(,(∑a,[x(t)- ie v 段内在平衡点是渐近稳定的。进一步根据式(18) 得到n(t)→(Lm)Lm(t)、xn(t)→ x()])+sg(92(∑a[()-()]),称 (L,)-1Lx(t),再由定理1得出此多智能体系 为控制器(1);和一种传统控制策略u(t)= 统在联合连通条件下能够实现包容控制。 sgn(∑a,[x,()-x,()])+sgm(∑a,[y,()- 由于在每个时间段[1,,,+1)内此多智能体系 jeN 统被分为n。个子系统,由定义3和引理1分析知此 ,(t)]),称为控制器2:进行仿真实验。 多智能体系统与带有扩张(2,2,…,2 应用控制器1与控制器2的各个智能体的位 置、速度与时间的关系如图2~5。 1+1,a1+1,…,&1+1)的度k=a1-1<0是同 d 跟随者1跟随者2跟随者3 次的。因此,由引理1得到此多智能体系统可以达 到有限时间收敛。 4仿真验证 跟随者4跟随者5 4.1静态拓扑仿真 设系统中有5个跟随者,跟随者集合为F={1, 2,3,4,5},要将这5个跟随者控制到三角形区域内, 假设系统信息拓扑图如图1所示,取如下系统矩阵: 2-10001 101520 -12-100 s Le= 0 -13-10 图2控制器1跟随者位置横坐标与时间关系 0 0 -12 -1 Fig.2 The relationship between the abscissa of followers 00 0-12 position under the action of controllerl and time体系统在联合连通条件下可以实现包容控制。 下面证明多智能体系统在联合连通条件下可以 实现有限时间收敛。 令: y i = - L i Fσ x - i Fσ(t),w i = - L i Fσ v - i Fσ(t) ( 20 ) 所以 v · i Fσ(t) = sgn[ φ 1 (y i )] α1 + sgn[ φ 2 (w i )] α2 且 y · i = w i ( 21 ) 构造李雅普诺夫函数 V i (t) = V i 1(t) + V i 2(t) ,其中: V i 1(t) = 1 2 v - iT Fσ(t) L i Fσ v - i Fσ(t) V i 2(t) = ∑ n z = 1 V i 2z(t)V i 2(t) = ∑ n z = 1 V i 2z(t) 式中: V i 2z(t) = ∫ (∑ d i σ j = 1 azj [xσj (t) -xσz (t)]) T 0 sgn [φ1(s i )] α1 ds i 。 上述李雅普诺夫函数沿着方程(19)的导数: V · i (t) = V · i 1(t) + V · i 2(t) = - ( w i 1 φ2(w i 1 ) φ2 + … + w i d i σ φ2(w i d i σ ) φ2 ) ≤ 0 注意到 V · i (t) = 0 当且仅当 w i = 0,由 xiφl(xi) > 0(∀xi ≠ 0) 和式(21),得到 y i = 0,由引理 2 和式 (20)得 v - i Fσ(t) = 0、 x - i Fσ(t) = 0,所以有且只有在平衡 点时才有 V · i (t) = 0,根据李雅普诺夫第二定理,得到 联合连通条件下此多智能体系统在 [t r,j,t r,j+1 ) 时间 段内在平衡点是渐近稳定的。 进一步根据式(18) 得 到 v i Fσ(t) → (L i Fσ ) -1 L i FLσ v i Lσ(t) 、 x i Fσ(t) → (L i Fσ ) -1 L i FLσ x i Lσ(t) ,再由定理 1 得出此多智能体系 统在联合连通条件下能够实现包容控制。 由于在每个时间段 [t r,j,t r,j+1 ) 内此多智能体系 统被分为 nσ 个子系统,由定义 3 和引理 1 分析知此 多 智 能 体 系 统 与 带 有 扩 张 ( 2þ ,2ï ,ý…ï ,ü2 d i σ , α1 + 1,α1 + 1,…,α1 + 1 þ ï ï ï ï ý ï ï ï ï ï ü d i σ ) 的度 k = α1 - 1 < 0 是同 次的。 因此,由引理 1 得到此多智能体系统可以达 到有限时间收敛。 4 仿真验证 4.1 静态拓扑仿真 设系统中有 5 个跟随者,跟随者集合为 F = {1, 2,3,4,5} ,要将这 5 个跟随者控制到三角形区域内, 假设系统信息拓扑图如图 1 所示,取如下系统矩阵: LF = 2 - 1 0 0 0 - 1 2 - 1 0 0 0 - 1 3 - 1 0 0 0 - 1 2 - 1 0 0 0 - 1 2 é ë ê ê ê ê ê ê ù û ú ú ú ú ú ú LFL = - 1 0 0 0 0 0 0 - 1 0 0 0 0 0 0 - 1 é ë ê ê ê ê ê ê ù û ú ú ú ú ú ú 图 1 跟随者与领航者静态拓扑图 Fig.1 The static topological graph of followers and leaders 令拓扑图每个边的权重均相等,假设为 1。 选 取 α1 = 0.8, α2 = 2α1 / (α1 + 1) , φ1(x) = 3x , φ2(x) =3x 。 目标 区 域 的 3 个 顶 点 位 置 为: ξ6 = [8 10] T , ξ7 = [10 8] T , ξ8 = [10 10] T ,各跟随 者的 初 始 位 置 为: ξ1(0) = [2 0] T , ξ2(0) = [4 0] T , ξ3(0) = [0 2] T , ξ4(0) = [0 4] T , ξ5(0) = [3 1] T 。 各跟随者的初速度为: v1(0) = [2 6] T , v2(0) = [3 8] T , v3(0) = [4 6] T , v4(0) = [5 5] T , v5(0) = [6 3] T 。 基于图 1 的拓扑图以及上述初始条件,分别应 用本文设计的控制器 ui(t) = sgn(φ1(∑ j∈Ni aij[xj(t) - xi(t)])) α1 + sgn(φ2(∑ j∈Ni aij[vj(t) - vi(t)])) α2 ,称 为控 制 器 ( 1 ); 和 一 种 传 统 控 制 策 略 ui(t) = sgn(∑ j∈Ni aij[xj(t) - xi(t)]) + sgn(∑ j∈Ni aij[vj(t) - vi(t)]) ,称为控制器 2;进行仿真实验。 应用控制器 1 与控制器 2 的各个智能体的位 置、速度与时间的关系如图 2~5。 图 2 控制器 1 跟随者位置横坐标与时间关系 Fig.2 The relationship between the abscissa of followers’ position under the action of controller1 and time ·192· 智 能 系 统 学 报 第 12 卷