正在加载图片...
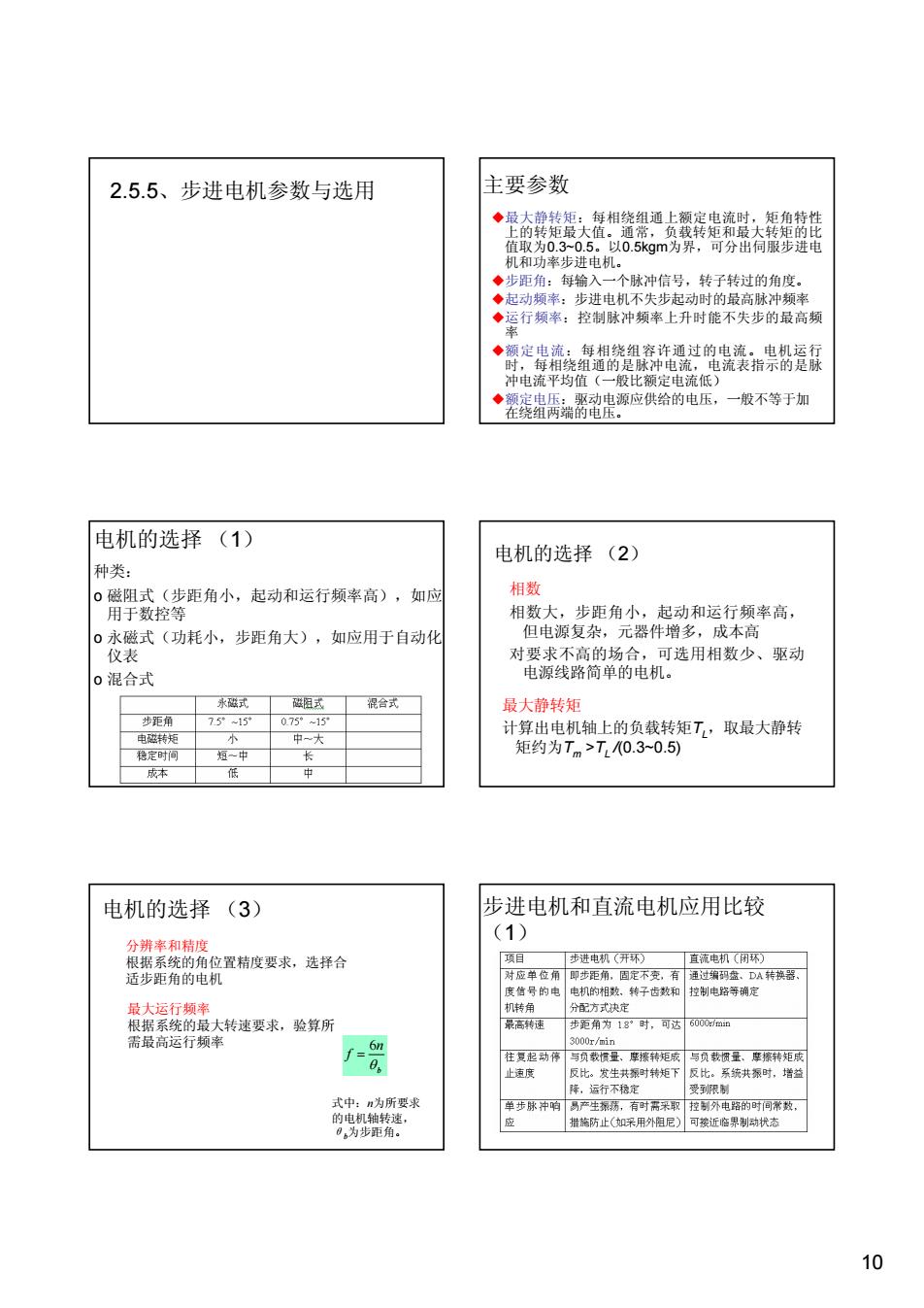
2.5.5、步进电机参数与选用 主要参数 ◆最大静转矩:每相绕组通上额定电流时,矩角特性 上的转矩最大值。通常,负载转矩和最大转矩的比 值取为0.3~0.5。以0.5kgm为界,可分出伺服步进电 机和功率步进电机。 ◆步距角:每输入一个脉冲信号,转子转过的角度。 ◆起动频率:步进电机不失步起动时的最高脉冲频率 ◆运行频率:控制脉冲频率上升时能不失步的最高频 率 ◆额定电流:每相绕组容许通过的电流。电机运行 时,每相绕组通的是脉冲电流,电流表指示的是脉 冲电流平均值(一般比额定电流低) ◆额定电压:驱动电源应供给的电压,一般不等于加 在绕组两端的电压。 电机的选择(1) 电机的选择(2) 种类: 0磁阻式(步距角小,起动和运行频率高),如应 相数 用于数控等 相数大,步距角小,起动和运行频率高, 。永磁式(功耗小,步距角大),如应用于自动化 但电源复杂,元器件增多,成本高 仪表 对要求不高的场合,可选用相数少、驱动 0混合式 电源线路简单的电机。 水磁式 磁阻式 混合式 最大静转矩 步距角 7.515 075°-15 电磁转炬 小 中一大 计算出电机轴上的负载转矩T,取最大静转 稳定时间 短一中 长 矩约为Tm>T0.30.5) 成本 低 中 电机的选择(3) 步进电机和直流电机应用比较 (1) 分辨率和精度 根据系统的角位置精度要求,选择合 项目 步进电机(开环 直流电机(闭环) 适步距角的电机 对应单位角即步距角,固定不变,有 通过编码盘、DA转换器、 度信号的电 电机的相数。转子齿数和 控制电路等确定 最大运行频率 机转角 分配方式决定 根据系统的最大转速要求,验算所 最高转速 步距角为18”时,可达 6000:/min 需最高运行频率 3000r/min 往复起动停 与负数惯量、摩擦转矩成 与负载惯量、摩擦转矩成 止速度 反比。发生共振时转矩下 反比。系统共振时,增益 稀,运行不秘定 受到限制 式中:n为所要求 单步脉冲响易产生振荡,有时需采取 控制外电路的时间常数, 的电机轴转速, 应 措施防止(如采用外阻尼) 可接近临界制动状态 0,为步距角。 1010 2.5.5、步进电机参数与选用 主要参数 最大静转矩:每相绕组通上额定电流时,矩角特性 上的转矩最大值。通常,负载转矩和最大转矩的比 值取为0.3~0.5。以0.5kgm为界,可分出伺服步进电 机和功率步进电机。 步距角:每输入一个脉冲信号,转子转过的角度。 起动频率:步进电机不失步起动时的最高脉冲频率 运行频率:控制脉冲频率上升时能不失步的最高频 率 额定电流:每相绕组容许通过的电流。电机运行 时,每相绕组通的是脉冲电流,电流表指示的是脉 冲电流平均值(一般比额定电流低) 额定电压:驱动电源应供给的电压,一般不等于加 在绕组两端的电压。 电机的选择 (1) 种类: o 磁阻式(步距角小,起动和运行频率高),如应 用于数控等 o 永磁式(功耗小,步距角大),如应用于自动化 仪表 o 混合式 电机的选择 (2) 相数 相数大,步距角小,起动和运行频率高, 但电源复杂,元器件增多,成本高 对要求不高的场合,可选用相数少、驱动 电源线路简单的电机。 最大静转矩 计算出电机轴上的负载转矩TL,取最大静转 矩约为Tm >TL /(0.3~0.5) 电机的选择 (3) b n f θ 6 = 分辨率和精度 根据系统的角位置精度要求,选择合 适步距角的电机 最大运行频率 根据系统的最大转速要求,验算所 需最高运行频率 式中:n为所要求 的电机轴转速, θb为步距角。 步进电机和直流电机应用比较 (1)