正在加载图片...
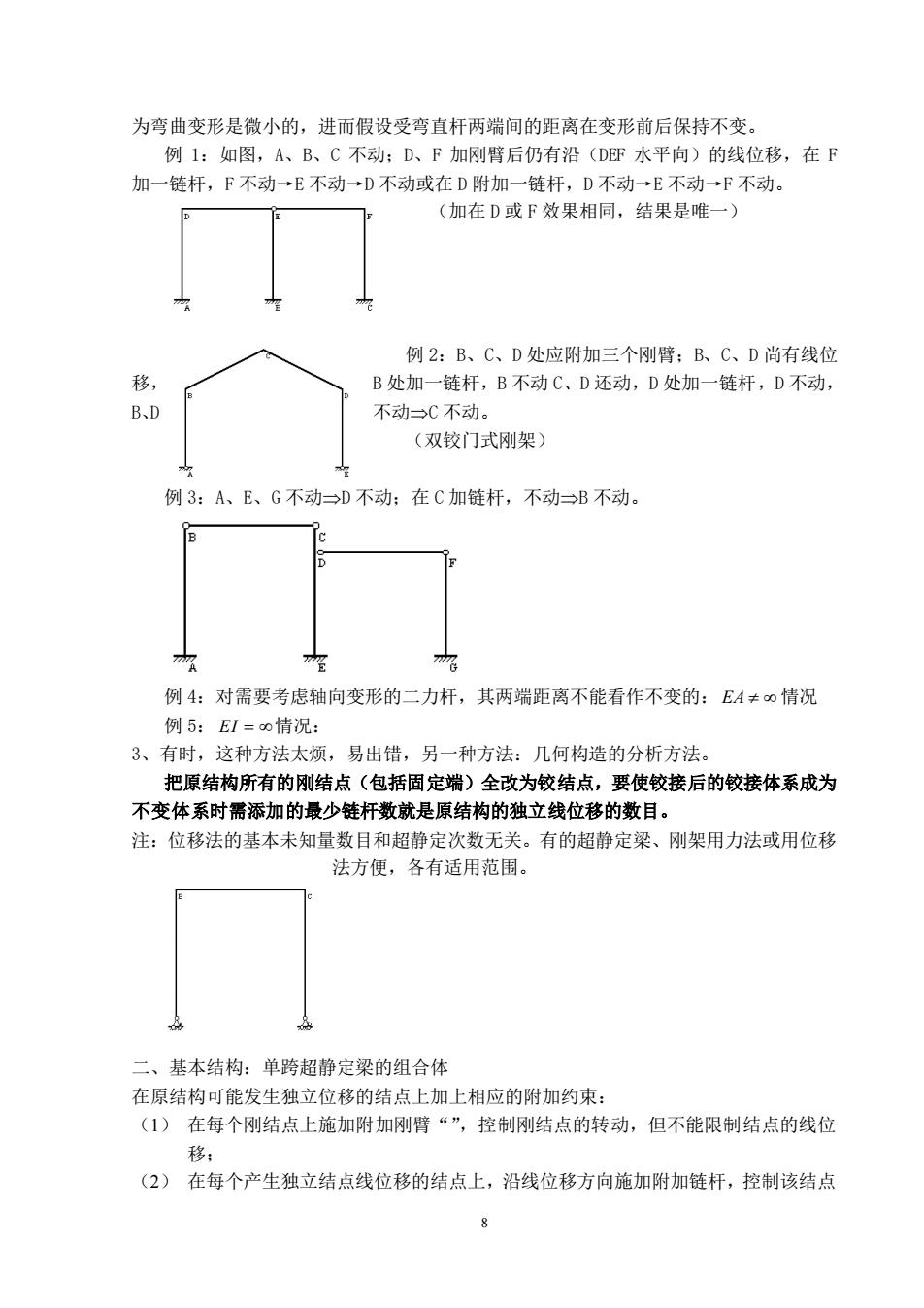
为弯曲变形是微小的,进而假设受弯直杆两端间的距离在变形前后保持不变 例1:如图,A、B、C不动:D、F加刚臂后仍有沿(DEF水平向)的线位移,在F 加一链杆,F不动一E不动一D不动或在D附加一链杆,D不动一E不动一F不动。 (加在D或F效果相同,结果是唯一) 例2:B、C、D处应附加三个刚臂:B、C、D尚有线位 移 B处加一链杆,B不动C、D还动,D处加一链杆,D不动, B、D 不动一C不动。 (双铰门式刚架) 例3:A、E、G不动→D不动:在C加链杆,不动一B不动。 例4:对需要考虑轴向变形的二力杆,其两端距离不能看作不变的:EA≠∞情况 例5:E1=o情况: 3、有时,这种方法太烦,易出错,另一种方法:几何构造的分析方法。 把原结构所有的刚结点(包括固定端)全改为铰结点,要使铰接后的铰接体系成为 不变体系时需添加的最少链杆数就是原结构的独立线位移的数目。 注:位移法的基本未知量数目和超静定次数无关。有的超静定梁、刚架用力法或用位移 法方便,各有适用范围。 二、基本结构:单跨超静定梁的组合体 在原结构可能发生独立位移的结点上加上相应的附加约束: (1)在每个刚结点上施加附加刚臂“”,控制刚结点的转动,但不能限制结点的线位 移: (2)在每个产生独立结点线位移的结点上,沿线位移方向施加附加链杆,控制该结点8 为弯曲变形是微小的,进而假设受弯直杆两端间的距离在变形前后保持不变。 例 1:如图,A、B、C 不动;D、F 加刚臂后仍有沿(DEF 水平向)的线位移,在 F 加一链杆,F 不动→E 不动→D 不动或在 D 附加一链杆,D 不动→E 不动→F 不动。 (加在 D 或 F 效果相同,结果是唯一) 例 2:B、C、D 处应附加三个刚臂;B、C、D 尚有线位 移, B 处加一链杆,B 不动 C、D 还动,D 处加一链杆,D 不动, B、D 不动C 不动。 (双铰门式刚架) 例 3:A、E、G 不动D 不动;在 C 加链杆,不动B 不动。 例 4:对需要考虑轴向变形的二力杆,其两端距离不能看作不变的: EA 情况 例 5: EI = 情况: 3、有时,这种方法太烦,易出错,另一种方法:几何构造的分析方法。 把原结构所有的刚结点(包括固定端)全改为铰结点,要使铰接后的铰接体系成为 不变体系时需添加的最少链杆数就是原结构的独立线位移的数目。 注:位移法的基本未知量数目和超静定次数无关。有的超静定梁、刚架用力法或用位移 法方便,各有适用范围。 二、基本结构:单跨超静定梁的组合体 在原结构可能发生独立位移的结点上加上相应的附加约束: (1) 在每个刚结点上施加附加刚臂“”,控制刚结点的转动,但不能限制结点的线位 移; (2) 在每个产生独立结点线位移的结点上,沿线位移方向施加附加链杆,控制该结点