正在加载图片...
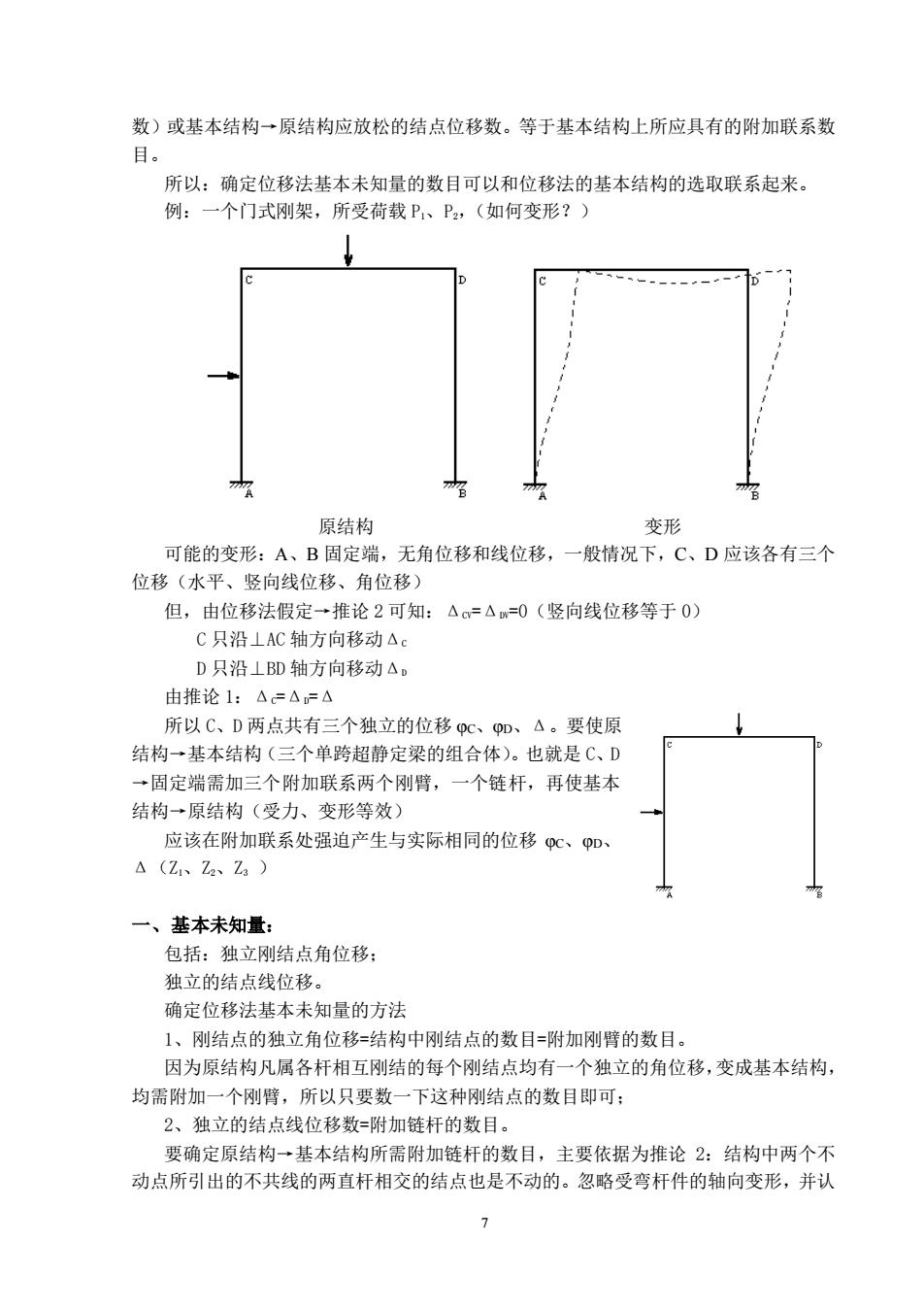
数)或基本结构→原结构应放松的结点位移数。等于基本结构上所应具有的附加联系数 目。 所以:确定位移法基本未知量的数目可以和位移法的基本结构的选取联系起来。 例:一个门式刚架,所受荷载P、P2,(如何变形?) 原结构 变形 可能的变形:A、B固定端,无角位移和线位移,一般情况下,C、D应该各有三个 位移(水平、竖向线位移、角位移) 但,由位移法假定一→推论2可知:△=△w=0(竖向线位移等于0) C只沿⊥AC轴方向移动△。 D只沿⊥BD轴方向移动△。 由推论1:△=△=△ 所以C、D两点共有三个独立的位移pc、pD、△。要使原 结构→基本结构(三个单跨超静定梁的组合体)。也就是C、D 一固定端需加三个附加联系两个刚臂, 一个链杆,再使基本 结构→原结构(受力、变形等效) 应该在附加联系处强迫产生与实际相同的位移pC、p、 △(Z、Z2、Z2) 一、基本未知量: 包括:独立刚结点角位移: 独立的结点线位移。 确定位移法基本未知量的方法 1、刚结点的独立角位移=结构中刚结点的数目=附加刚臂的数目。 因为原结构凡属各杆相互刚结的每个刚结点均有一个独立的角位移,变成基本结构, 均需附加一个刚臂,所以只要数一下这种刚结点的数目即可: 2、独立的结点线位移数=附加链杆的数目。 要确定原结构→基本结构所需附加链杆的数目,主要依据为推论2:结构中两个不 动点所引出的不共线的两直杆相交的结点也是不动的。忽略受弯杆件的轴向变形,并认 > 7 数)或基本结构→原结构应放松的结点位移数。等于基本结构上所应具有的附加联系数 目。 所以:确定位移法基本未知量的数目可以和位移法的基本结构的选取联系起来。 例:一个门式刚架,所受荷载 P1、P2,(如何变形?) 原结构 变形 可能的变形:A、B 固定端,无角位移和线位移,一般情况下,C、D 应该各有三个 位移(水平、竖向线位移、角位移) 但,由位移法假定→推论 2 可知:ΔCV=ΔDV=0(竖向线位移等于 0) C 只沿⊥AC 轴方向移动ΔC D 只沿⊥BD 轴方向移动ΔD 由推论 1:ΔC=ΔD=Δ 所以 C、D 两点共有三个独立的位移 φC、φD、Δ。要使原 结构→基本结构(三个单跨超静定梁的组合体)。也就是 C、D →固定端需加三个附加联系两个刚臂,一个链杆,再使基本 结构→原结构(受力、变形等效) 应该在附加联系处强迫产生与实际相同的位移 φC、φD、 Δ(Z1、Z2、Z3 ) 一、基本未知量: 包括:独立刚结点角位移; 独立的结点线位移。 确定位移法基本未知量的方法 1、刚结点的独立角位移=结构中刚结点的数目=附加刚臂的数目。 因为原结构凡属各杆相互刚结的每个刚结点均有一个独立的角位移,变成基本结构, 均需附加一个刚臂,所以只要数一下这种刚结点的数目即可; 2、独立的结点线位移数=附加链杆的数目。 要确定原结构→基本结构所需附加链杆的数目,主要依据为推论 2:结构中两个不 动点所引出的不共线的两直杆相交的结点也是不动的。忽略受弯杆件的轴向变形,并认