正在加载图片...
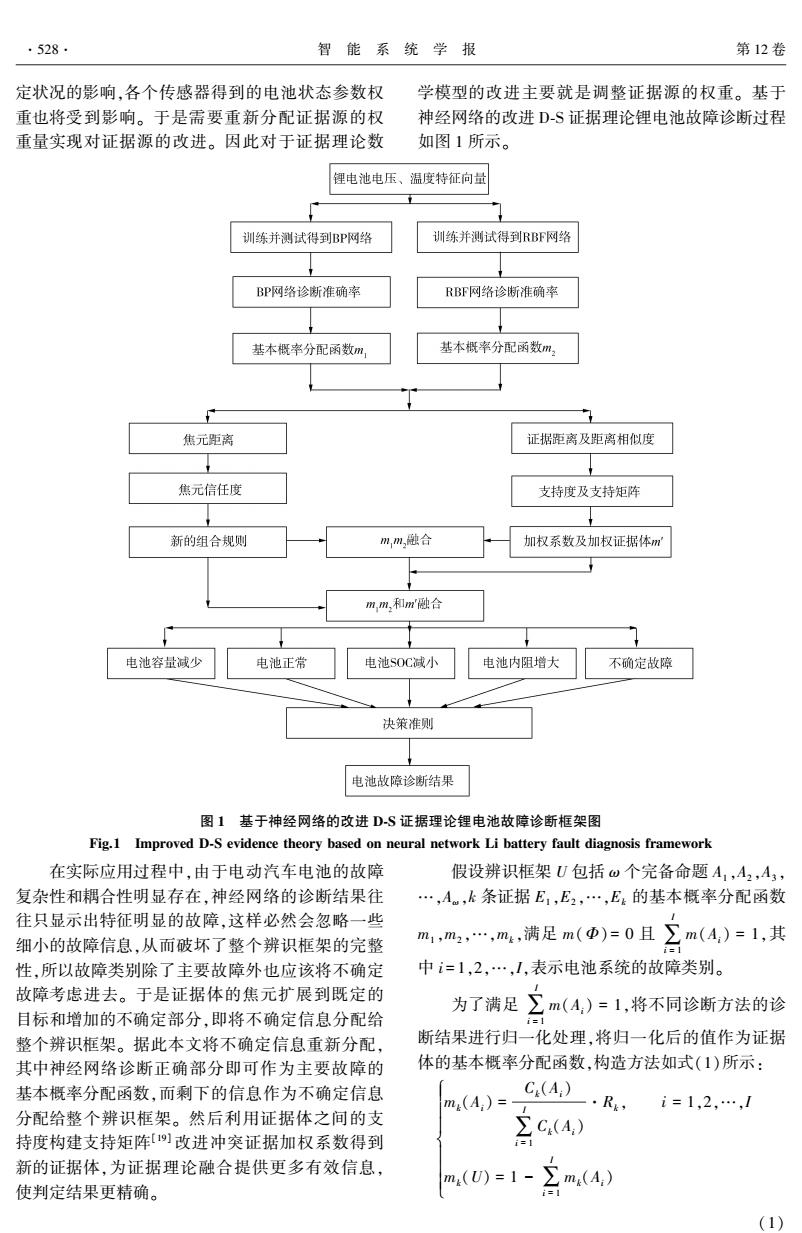
.528. 智能系统学报 第12卷 定状况的影响,各个传感器得到的电池状态参数权 学模型的改进主要就是调整证据源的权重。基于 重也将受到影响。于是需要重新分配证据源的权 神经网络的改进D-S证据理论锂电池故障诊断过程 重量实现对证据源的改进。因此对于证据理论数 如图1所示。 锂电池电压、温度特征向量 训练并测试得到BP网络 训练并测试得到RBF网络 BP网络诊断准确率 RBF网络诊断谁确率 基本概率分配函数m, 基本概率分配函数m? 焦元距离 证据距离及距离相似度 焦元信任度 支持度及支持矩阵 新的组合规则 m,m,融合 加权系数及加权证据体m m,m,和m'融合 电池容量减少 电池正常 电池S0C减小 电池内阻增大 不确定故障 决策准则 电池故障诊断结果 图1基于神经网络的改进DS证据理论锂电池故障诊断框架图 Fig.1 Improved D-S evidence theory based on neural network Li battery fault diagnosis framework 在实际应用过程中,由于电动汽车电池的故障 假设辨识框架U包括w个完备命题A1,A2,A3, 复杂性和耦合性明显存在,神经网络的诊断结果往 …,A,k条证据E1,E2,…,E:的基本概率分配函数 往只显示出特征明显的故障,这样必然会忽略一些 细小的故障信息,从而破坏了整个辨识框架的完整 m,m…,m,满足m()=0且三m(4)=1,其 性,所以故障类别除了主要故障外也应该将不确定 中i=1,2,…,1,表示电池系统的故障类别。 故障考虑进去。于是证据体的焦元扩展到既定的 为了满足∑m(4,)=1,将不同诊断方法的诊 目标和增加的不确定部分,即将不确定信息分配给 整个辨识框架。据此本文将不确定信息重新分配, 断结果进行归一化处理,将归一化后的值作为证据 其中神经网络诊断正确部分即可作为主要故障的 体的基本概率分配函数,构造方法如式(1)所示: 基本概率分配函数,而剩下的信息作为不确定信息 C(A) m(A:)= -·R4,i=1,2,…,1 分配给整个辨识框架。然后利用证据体之间的支 持度构建支持矩阵[]改进冲突证据加权系数得到 三c 新的证据体,为证据理论融合提供更多有效信息, 使判定结果更精确。 (0=1-三m4) (1)定状况的影响,各个传感器得到的电池状态参数权 重也将受到影响。 于是需要重新分配证据源的权 重量实现对证据源的改进。 因此对于证据理论数 学模型的改进主要就是调整证据源的权重。 基于 神经网络的改进 D⁃S 证据理论锂电池故障诊断过程 如图 1 所示。 图 1 基于神经网络的改进 D⁃S 证据理论锂电池故障诊断框架图 Fig.1 Improved D⁃S evidence theory based on neural network Li battery fault diagnosis framework 在实际应用过程中,由于电动汽车电池的故障 复杂性和耦合性明显存在,神经网络的诊断结果往 往只显示出特征明显的故障,这样必然会忽略一些 细小的故障信息,从而破坏了整个辨识框架的完整 性,所以故障类别除了主要故障外也应该将不确定 故障考虑进去。 于是证据体的焦元扩展到既定的 目标和增加的不确定部分,即将不确定信息分配给 整个辨识框架。 据此本文将不确定信息重新分配, 其中神经网络诊断正确部分即可作为主要故障的 基本概率分配函数,而剩下的信息作为不确定信息 分配给整个辨识框架。 然后利用证据体之间的支 持度构建支持矩阵[19] 改进冲突证据加权系数得到 新的证据体,为证据理论融合提供更多有效信息, 使判定结果更精确。 假设辨识框架 U 包括 ω 个完备命题 A1 ,A2 ,A3 , …,Aω,k 条证据 E1 ,E2 ,…,Ek 的基本概率分配函数 m1 ,m2 ,…,mk,满足 m(Φ) = 0 且 ∑ I i = 1 m(Ai) = 1,其 中 i = 1,2,…,I,表示电池系统的故障类别。 为了满足 ∑ I i = 1 m(Ai) = 1,将不同诊断方法的诊 断结果进行归一化处理,将归一化后的值作为证据 体的基本概率分配函数,构造方法如式(1)所示: mk(Ai) = Ck(Ai) ∑ I i = 1 Ck(Ai) ·Rk, i = 1,2,…,I mk(U) = 1 - ∑ I i = 1 mk(Ai) ì î í ï ï ï ï ï ï (1) ·528· 智 能 系 统 学 报 第 12 卷