正在加载图片...
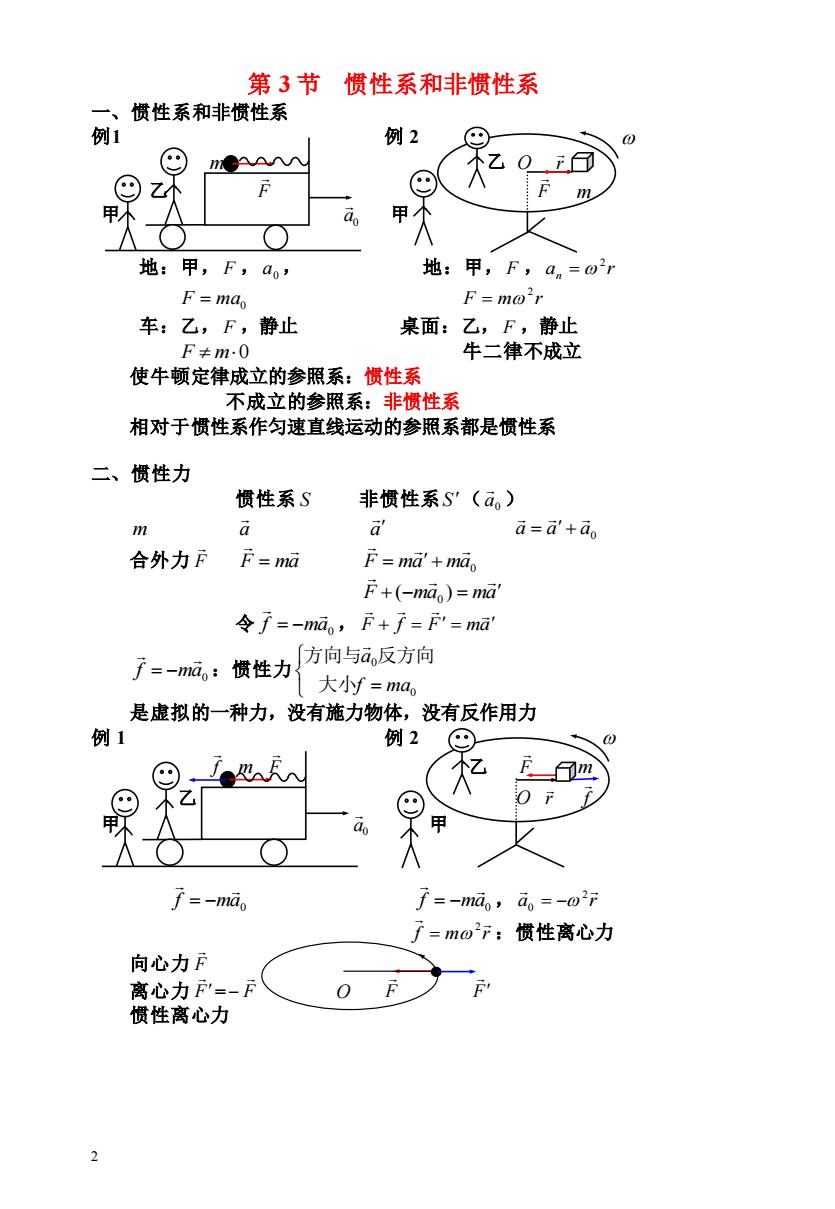
第3节 惯性系和非惯性系 、 惯性系和非惯性系 例1 例2 m 甲个 地:甲,F,a, 地:甲,F,an=o21 F=mdo F=mo'r 车:乙,F,静止 桌面:乙,F,静止 F≠m.0 牛二律不成立 使牛顿定律成立的参照系:惯性系 不成立的参照系:非惯性系 相对于惯性系作匀速直线运动的参照系都是惯性系 二、惯性力 惯性系S 非惯性系S'(a) m a a a=a'+ao 合外力F F=ma F=ma'+mdo F+(-mdo)=ma' 令子=-ma。,F+子-F'=ma 子=-ma。:惯性力 方向与a反方向 大小f=ma 是虚拟的一种力,没有施力物体,没有反作用力 例1 例2 f=-mdo f=-ma,a。=-027 子=mo2行:惯性离心力 向心力F 离心力F=-F F 惯性离心力 22 第 3 节 惯性系和非惯性系 一、惯性系和非惯性系 例1 例 2 m 乙 O r 乙 F F m 甲 0 a 甲 地:甲, F , 0 a , 地:甲, F ,a r n 2 = F = ma0 F m r 2 = 车:乙, F ,静止 桌面:乙, F ,静止 F m0 牛二律不成立 使牛顿定律成立的参照系:惯性系 不成立的参照系:非惯性系 相对于惯性系作匀速直线运动的参照系都是惯性系 二、惯性力 惯性系 S 非惯性系 S ( 0 a ) m a a a a a0 = + 合外力 F F ma = F ma ma0 = + F + −ma = ma ( ) 0 令 ma0 f = − , F + f = F = ma ma0 f = − :惯性力 = 0 0 f ma a 大小 方向与 反方向 是虚拟的一种力,没有施力物体,没有反作用力 例 1 例 2 f m F 乙 F m 乙 O r f 甲 0 a 甲 ma0 f = − ma0 f = − , a r 2 0 = − f m r 2 = :惯性离心力 向心力 F 离心力 F = F − O F F 惯性离心力