正在加载图片...
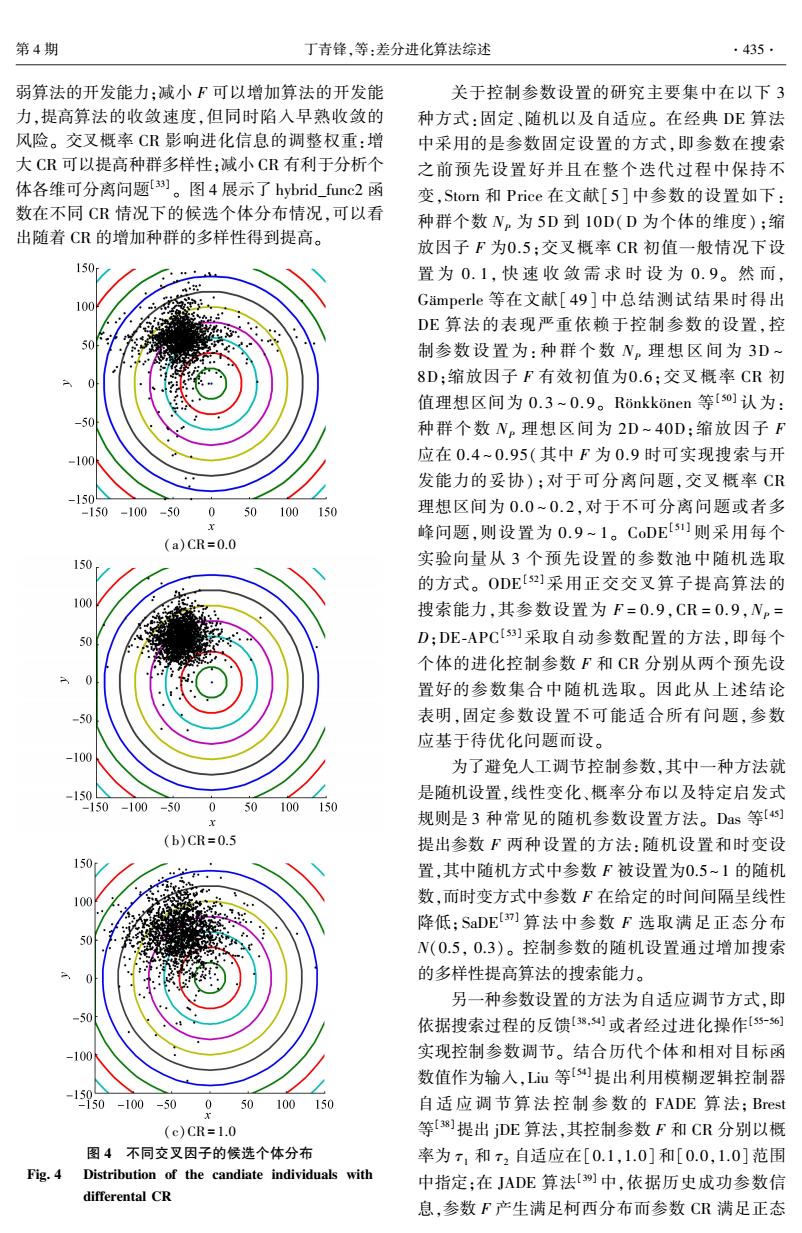
第4期 丁青锋,等:差分进化算法综述 ·435. 弱算法的开发能力:减小F可以增加算法的开发能 关于控制参数设置的研究主要集中在以下3 力,提高算法的收敛速度,但同时陷入早熟收敛的 种方式:固定、随机以及自适应。在经典DE算法 风险。交叉概率CR影响进化信息的调整权重:增 中采用的是参数固定设置的方式,即参数在搜索 大CR可以提高种群多样性:减小CR有利于分析个 之前预先设置好并且在整个迭代过程中保持不 体各维可分离问题划。图4展示了hybrid_func2函 变,Stom和Price在文献[5]中参数的设置如下: 数在不同CR情况下的候选个体分布情况,可以看 种群个数Np为5D到10D(D为个体的维度):缩 出随着CR的增加种群的多样性得到提高。 放因子F为0.5;交叉概率CR初值一般情况下设 150 置为0.1,快速收敛需求时设为0.9。然而, 100 Gamperle等在文献[49]中总结测试结果时得出 DE算法的表现严重依赖于控制参数的设置,控 制参数设置为:种群个数N。理想区间为3D~ 8D:缩放因子F有效初值为0.6;交叉概率CR初 值理想区间为0.3~0.9。Ronkkonen等[s0o]认为: 种群个数N。理想区间为2D~40D:缩放因子F 应在0.4~0.95(其中F为0.9时可实现搜索与开 发能力的妥协);对于可分离问题,交叉概率CR -150 -150-100 -50 050100150 理想区间为0.0~0.2,对于不可分离问题或者多 ” 峰问题,则设置为0.9~1。CoDE's1则采用每个 (a)CR=0.0 150 实验向量从3个预先设置的参数池中随机选取 的方式。ODE[s]采用正交交叉算子提高算法的 100 搜索能力,其参数设置为F=0.9,CR=0.9,Np= 50 D:DE-APCs3]采取自动参数配置的方法,即每个 个体的进化控制参数F和CR分别从两个预先设 置好的参数集合中随机选取。因此从上述结论 -50 表明,固定参数设置不可能适合所有问题,参数 应基于待优化问题而设。 -100 为了避免人工调节控制参数,其中一种方法就 -150 是随机设置,线性变化、概率分布以及特定启发式 150-100-50050100150 规则是3种常见的随机参数设置方法。Das等[4s) (b)CR=0.5 提出参数F两种设置的方法:随机设置和时变设 150r 置,其中随机方式中参数F被设置为0.5~1的随机 100 数,而时变方式中参数F在给定的时间间隔呈线性 降低:SaDE算法中参数F选取满足正态分布 N(0.5,0.3)。控制参数的随机设置通过增加搜索 的多样性提高算法的搜索能力。 另一种参数设置的方法为自适应调节方式,即 依据搜索过程的反馈8,]或者经过进化操作s5-s6 100 实现控制参数调节。结合历代个体和相对目标函 数值作为输入,Lu等s提出利用模糊逻辑控制器 -150-100-50 050100150 自适应调节算法控制参数的FADE算法;Brest (c)CR=1.0 等3]提出DE算法,其控制参数F和CR分别以概 图4不同交叉因子的候选个体分布 率为7,和72自适应在[0.1,1.0]和[0.0,1.0]范围 Fig.4 Distribution of the candiate individuals with 中指定:在JADE算法[3]中,依据历史成功参数信 differental CR 息,参数F产生满足柯西分布而参数CR满足正态弱算法的开发能力;减小 F 可以增加算法的开发能 力,提高算法的收敛速度,但同时陷入早熟收敛的 风险。 交叉概率 CR 影响进化信息的调整权重:增 大 CR 可以提高种群多样性;减小 CR 有利于分析个 体各维可分离问题[33] 。 图 4 展示了 hybrid_func2 函 数在不同 CR 情况下的候选个体分布情况,可以看 出随着 CR 的增加种群的多样性得到提高。 (a)CR= 0.0 (b)CR= 0.5 (c)CR= 1.0 图 4 不同交叉因子的候选个体分布 Fig. 4 Distribution of the candiate individuals with differental CR 关于控制参数设置的研究主要集中在以下 3 种方式:固定、随机以及自适应。 在经典 DE 算法 中采用的是参数固定设置的方式,即参数在搜索 之前预先设置好并且在整个迭代过程中保持不 变,Storn 和 Price 在文献[ 5] 中参数的设置如下: 种群个数 NP 为 5D 到 10D(D 为个体的维度) ;缩 放因子 F 为0.5;交叉概率 CR 初值一般情况下设 置 为 0. 1, 快 速 收 敛 需 求 时 设 为 0. 9。 然 而, Gämperle 等在文献[ 49] 中总结测试结果时得出 DE 算法的表现严重依赖于控制参数的设置,控 制参数 设 置 为: 种 群 个 数 NP 理 想 区 间 为 3D ~ 8D;缩放因子 F 有效初值为0.6;交叉概率 CR 初 值理想区间为 0. 3 ~ 0. 9。 Rönkkönen 等[ 50] 认为: 种群个数 NP 理想区间为 2D ~ 40D;缩放因子 F 应在 0.4 ~ 0.95(其中 F 为 0.9 时可实现搜索与开 发能力的妥协) ;对于可分离问题,交叉概率 CR 理想区间为 0.0 ~ 0. 2,对于不可分离问题或者多 峰问题,则设置为 0. 9 ~ 1。 CoDE [ 51] 则采用每个 实验向量从 3 个预先设置的参数池中随机选取 的方式。 ODE [ 52] 采用正交交叉算子提高算法的 搜索能力,其参数设置为 F = 0. 9,CR = 0. 9,NP = D;DE⁃APC [ 53] 采取自动参数配置的方法,即每个 个体的进化控制参数 F 和 CR 分别从两个预先设 置好的参数集合中随机选取。 因此从上述结论 表明,固定参数设置不可能适合所有问题,参数 应基于待优化问题而设。 为了避免人工调节控制参数,其中一种方法就 是随机设置,线性变化、概率分布以及特定启发式 规则是 3 种常见的随机参数设置方法。 Das 等[45] 提出参数 F 两种设置的方法:随机设置和时变设 置,其中随机方式中参数 F 被设置为0.5~ 1 的随机 数,而时变方式中参数 F 在给定的时间间隔呈线性 降低; SaDE [37] 算法中参数 F 选取满足正态分布 N(0.5, 0.3)。 控制参数的随机设置通过增加搜索 的多样性提高算法的搜索能力。 另一种参数设置的方法为自适应调节方式,即 依据搜索过程的反馈[38,54] 或者经过进化操作[55-56] 实现控制参数调节。 结合历代个体和相对目标函 数值作为输入,Liu 等[54] 提出利用模糊逻辑控制器 自适 应 调 节 算 法 控 制 参 数 的 FADE 算 法; Brest 等[38]提出 jDE 算法,其控制参数 F 和 CR 分别以概 率为 τ1 和 τ2 自适应在[0.1,1.0]和[0.0,1.0]范围 中指定;在 JADE 算法[39] 中,依据历史成功参数信 息,参数 F 产生满足柯西分布而参数 CR 满足正态 第 4 期 丁青锋,等:差分进化算法综述 ·435·