正在加载图片...
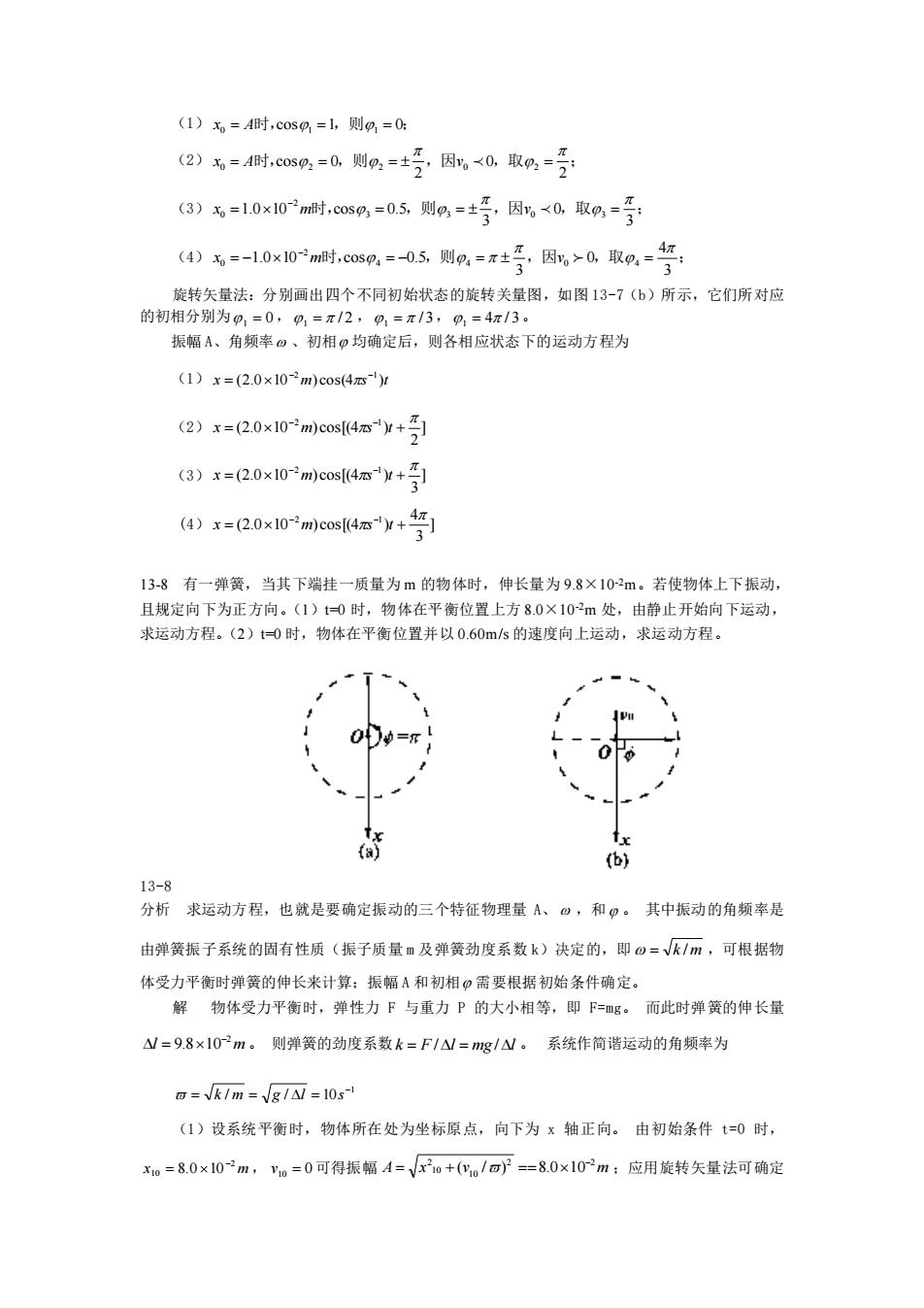
《1)无=4时e0s%=1.则g=0 (2)名=时,04=0则码=±经因。<0取码- 《3)无=10x10w时.o0s%=05则%=号因%<0取码=子 名-10x0时5题=号6a取,- 3 旋转矢量法:分别面出四个不同初始找态的旋转美量图,如图13-7()所示,它们所对应 的初相分测为%-0,%-夏/2,停-g/3,4=4红/3: 丽幅A,角频率四,初相口均确定后。则各相应状志下的运动方程为 41)x=(2.0×10w0os4g (2)xy (3)-20x0mco4ag+ (4)=xm)co 138有一弹簧,当其下端挂一质量为曲的物体时,伸长量为9.8×102m。若使物体上下振动, 且规定向下为正方向.《1)0时,物体在平衡位置上方80×10■处,由静止开始向下运动, 象运动方程。(2)0时。物体在平衡位置并以060m小的速度向上运动,乘运动方程, b 13-8 分析求运动方程。也就是要确定握动的三个特征物理量A、⑧,和?:其中量动的角频率是 山弹簧暴予系统的国有性质(振子质量■及弹簧劲度系数k》浇定的。即心■、√/m,可根据物 体受力平衡时弹簧的伸长来计算:探幅A和初相需要复据初始条件确定。 解物体受力平衡时,弹性力F与重力P的大小相等,即P。而此时弹簧的伸长量 W=98×10广刚。则弹簧的动度系数k=F/山=四/W。系统作简著运动的角频率为 a=1w-g1-10s (1)设系绕平衡时,物体所在处为坐标眼点,向下为夏轴正向。由初始条件10时, 。=8.0x0m,,=0可得耀幅4-√2+(0/了=80x10周:应用旋转矢量法可确定 (1) x0 = A时,cos1 =1,则1 = 0; (2) 时, ,则 ,因 ,取 ; 2 0 2 0 cos 2 0 2 0 2 x = A = = v = (3) 时, ,则 ,因 ,取 ; 3 0 3 1.0 10 cos 3 0.5 3 0 3 2 0 = = = = − x m v (4) 时, ,则 ,因 ,取 ; 3 4 0 3 1.0 10 cos 4 0.5 4 0 4 2 0 = − = − = = − x m v 旋转矢量法:分别画出四个不同初始状态的旋转关量图,如图 13-7(b)所示,它们所对应 的初相分别为 1 = 0,1 = / 2 ,1 = / 3,1 = 4 / 3。 振幅 A、角频率 、初相 均确定后,则各相应状态下的运动方程为 (1) x (2.0 10 m) cos(4 s )t −2 −1 = (2) ] 2 (2.0 10 )cos[(4 ) 2 1 = + − − x m s t (3) ] 3 (2.0 10 )cos[(4 ) 2 1 = + − − x m s t (4) ] 3 4 (2.0 10 ) cos[(4 ) 2 1 = + − − x m s t 13-8 有一弹簧,当其下端挂一质量为 m 的物体时,伸长量为 9.8×10-2m。若使物体上下振动, 且规定向下为正方向。(1)t=0 时,物体在平衡位置上方 8.0×10-2m 处,由静止开始向下运动, 求运动方程。(2)t=0 时,物体在平衡位置并以 0.60m/s 的速度向上运动,求运动方程。 13-8 分析 求运动方程,也就是要确定振动的三个特征物理量 A、 ,和 。 其中振动的角频率是 由弹簧振子系统的固有性质(振子质量 m 及弹簧劲度系数 k)决定的,即 = k /m ,可根据物 体受力平衡时弹簧的伸长来计算;振幅 A 和初相 需要根据初始条件确定。 解 物体受力平衡时,弹性力 F 与重力 P 的大小相等,即 F=mg。 而此时弹簧的伸长量 l m 2 9.8 10− = 。 则弹簧的劲度系数 k = F /l = mg /l 。 系统作简谐运动的角频率为 1 / / 10 − = k m = g l = s (1)设系统平衡时,物体所在处为坐标原点,向下为 x 轴正向。 由初始条件 t=0 时, x m 2 10 8.0 10 − = , v10 = 0 可得振幅 A x v m 2 2 10 10 2 ( / ) 8.0 10− = + == ;应用旋转矢量法可确定