正在加载图片...
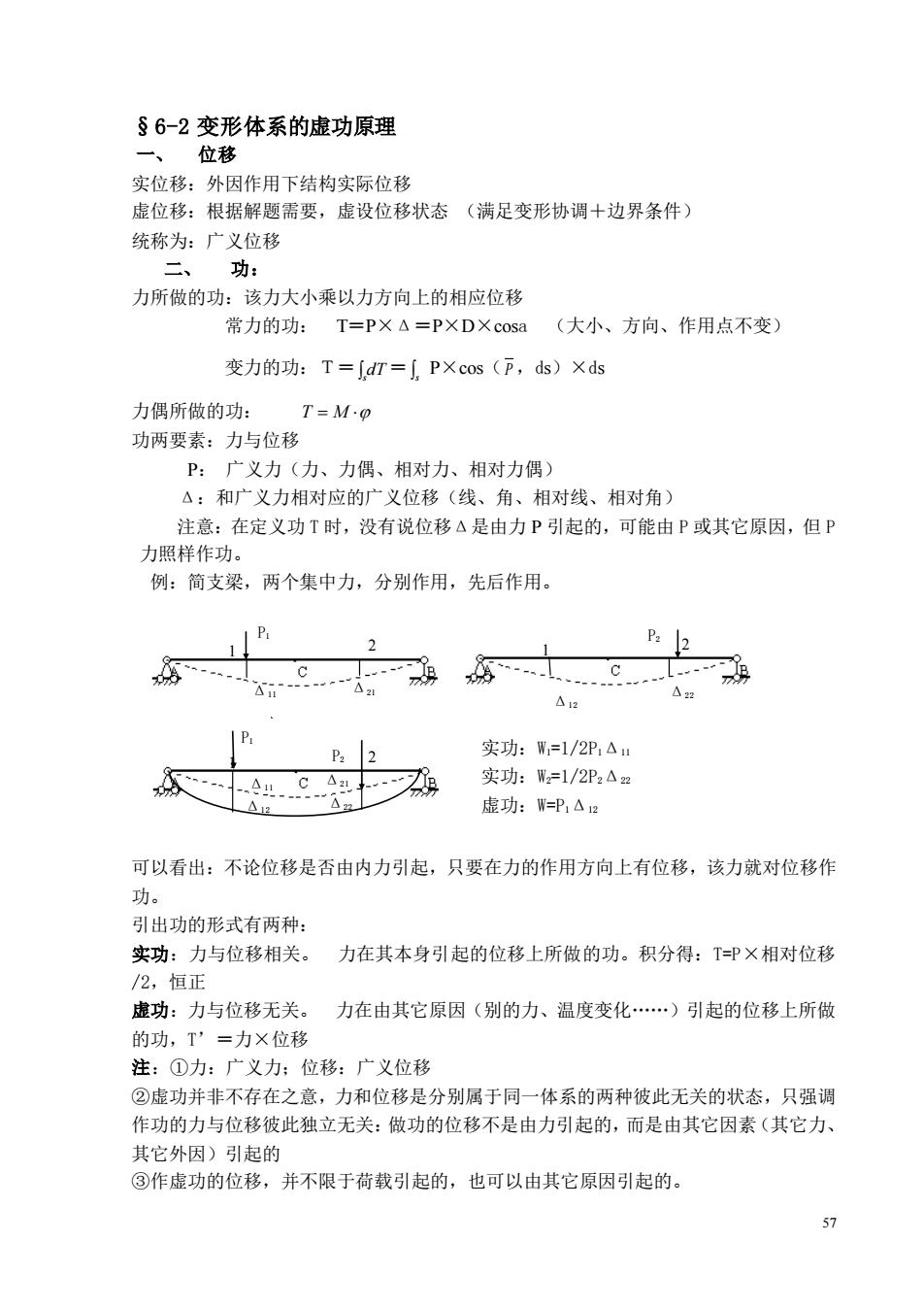
§6-2变形体系的虚功原理 位移 实位移:外因作用下结构实际位移 虚位移:根据解题需要,虚设位移状态(满足变形协调+边界条件) 统称为:广义位移 功: 力所做的功:该力大小乘以力方向上的相应位移 常力的功:T=PX△=PXD×cosa(大小、方向、作用点不变) 变力的功:T=∫dT=PXcos(P,ds)×ds 力偶所做的功: T=M· 功两要素:力与位移 P:广义力(力、力偶、相对力、相对力偶) △:和广义力相对应的广义位移(线、角、相对线、相对角) 注意:在定义功T时,没有说位移△是由力P引起的,可能由P或其它原因,但P 力照样作功。 例:简支梁,两个集中力,分别作用,先后作用。 2 △a P P:2 实功:W=1/2P,△n 实功:W=1/2P,△2 12 虚功:=P△ 可以看出:不论位移是否由内力引起,只要在力的作用方向上有位移,该力就对位移作 功。 引出功的形式有两种: 实功:力与位移相关。力在其本身引起的位移上所做的功。积分得:T=印×相对位移 /2,恒正 虚功:力与位移无关。力在由其它原因(别的力、温度变化.)引起的位移上所做 的功,T'=力×位移 注:①力:广义力:位移:广义位移 ②虚功并非不存在之意,力和位移是分别属于同一体系的两种彼此无关的状态,只强调 作功的力与位移彼此独立无关:做功的位移不是由力引起的,而是由其它因素(其它力、 其它外因)引起的 ③作虚功的位移,并不限于荷载引起的,也可以由其它原因引起的。 57 57 §6-2 变形体系的虚功原理 一、 位移 实位移:外因作用下结构实际位移 虚位移:根据解题需要,虚设位移状态 (满足变形协调+边界条件) 统称为:广义位移 二、 功: 力所做的功:该力大小乘以力方向上的相应位移 常力的功: T=P×Δ=P×D×cosa (大小、方向、作用点不变) 变力的功:T= s dT = s P×cos( P ,ds)×ds 力偶所做的功: T M= 功两要素:力与位移 P: 广义力(力、力偶、相对力、相对力偶) Δ:和广义力相对应的广义位移(线、角、相对线、相对角) 注意:在定义功 T 时,没有说位移Δ是由力 P 引起的,可能由 P 或其它原因,但 P 力照样作功。 例:简支梁,两个集中力,分别作用,先后作用。 可以看出:不论位移是否由内力引起,只要在力的作用方向上有位移,该力就对位移作 功。 引出功的形式有两种: 实功:力与位移相关。 力在其本身引起的位移上所做的功。积分得:T=P×相对位移 /2,恒正 虚功:力与位移无关。 力在由其它原因(别的力、温度变化.)引起的位移上所做 的功,T’=力×位移 注:①力:广义力;位移:广义位移 ②虚功并非不存在之意,力和位移是分别属于同一体系的两种彼此无关的状态,只强调 作功的力与位移彼此独立无关:做功的位移不是由力引起的,而是由其它因素(其它力、 其它外因)引起的 ③作虚功的位移,并不限于荷载引起的,也可以由其它原因引起的。 1 2 Δ11 Δ21 P1 1 2 Δ12 Δ22 P2 1 2 P1 P2 Δ11 Δ12 Δ21 Δ22 实功:W1=1/2P1Δ11 实功:W2=1/2P2Δ22 虚功:W=P1Δ12