正在加载图片...
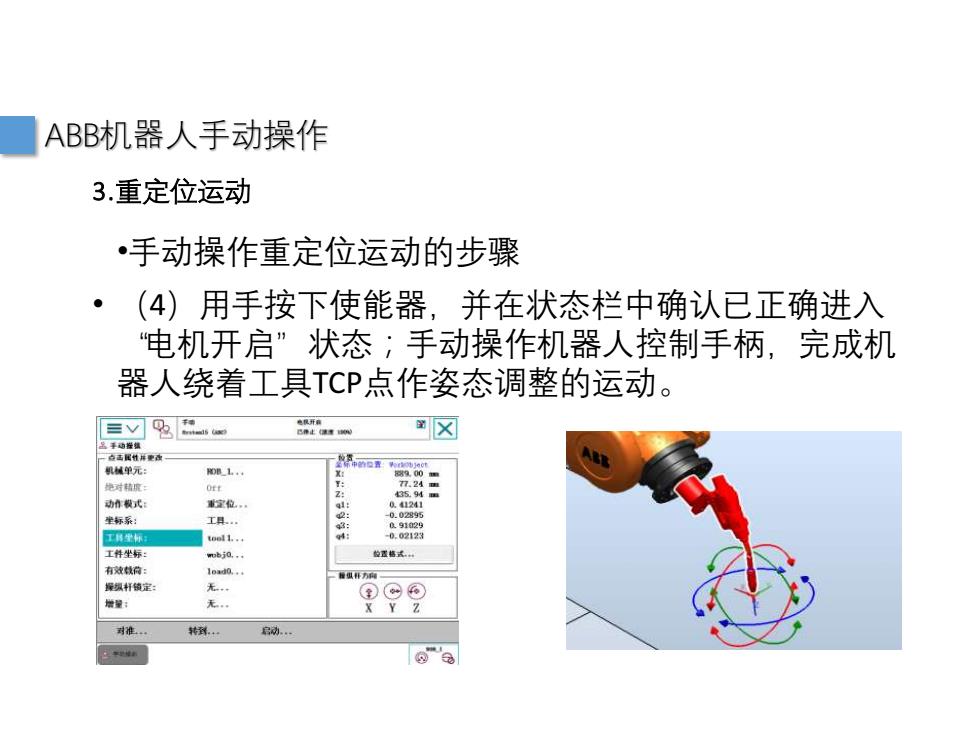
ABB机器人手动操作 3.重定位运动 •手动操作重定位运动的步骤 (4)用手按下使能器,并在状态栏中确认已正确进入 “电机开启”状态;手动操作机器人控制手柄,完成机 器人绕着工具TCP点作姿态调整的运动。 目V%g ☒ 丝手动楼镇 一点西属性样更南 机械单元: BOB_1. 地对精痕 OFE .24 z B 动n根式 重位 坐标系: 工具. 工样学标 tool1. 工件坐标 wbjo. 有效载荷: 1od0., 程国补为 绿纵杆锁定 无 ⊙ 增望 无 XYZ 对准 启动 a •手动操作重定位运动的步骤 • (4)用手按下使能器,并在状态栏中确认已正确进入 “电机开启”状态;手动操作机器人控制手柄,完成机 器人绕着工具TCP点作姿态调整的运动。 ABB机器人手动操作 3.重定位运动