正在加载图片...
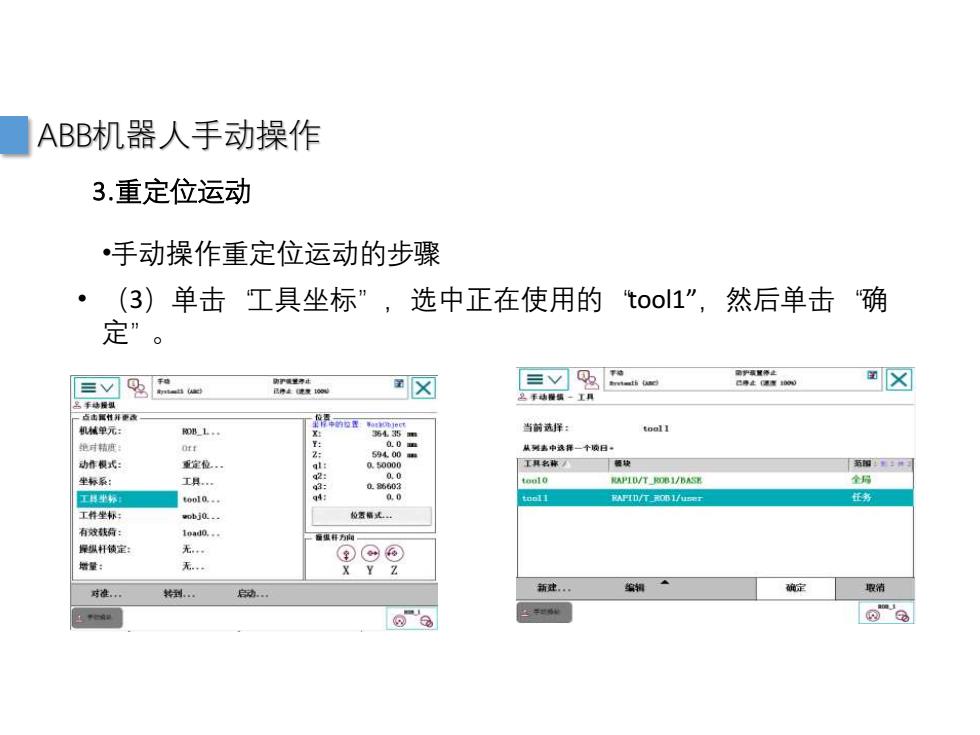
ABB机器人手动操作 3.重定位运动 •手动操作重定位运动的步骤 (3)单击工具坐标”,选中正在使用的t0o1”,然后单击“确 定”。 ☒ a带在0 ☒ 机城单元: 10B_L. 当前选择: 绝时精度 从中这挥一个项日 动作根式: 重定位. 工和名称 额块 药国有节司 坐标系: 工月. PID/T电1/BAS 工书坐杯 tool0. A/作n7 任 工料坐标: wobj0. 枪爱幅远。 有效或情: 1oa0.。. 鼻纵轩领定 无. )⊙© 婚量: 无 X Y Z 对 转到 启动 新建。 取清 a"a ”•手动操作重定位运动的步骤 • (3)单击“工具坐标”,选中正在使用的“tool1”,然后单击“确 定”。 ABB机器人手动操作 3.重定位运动