正在加载图片...
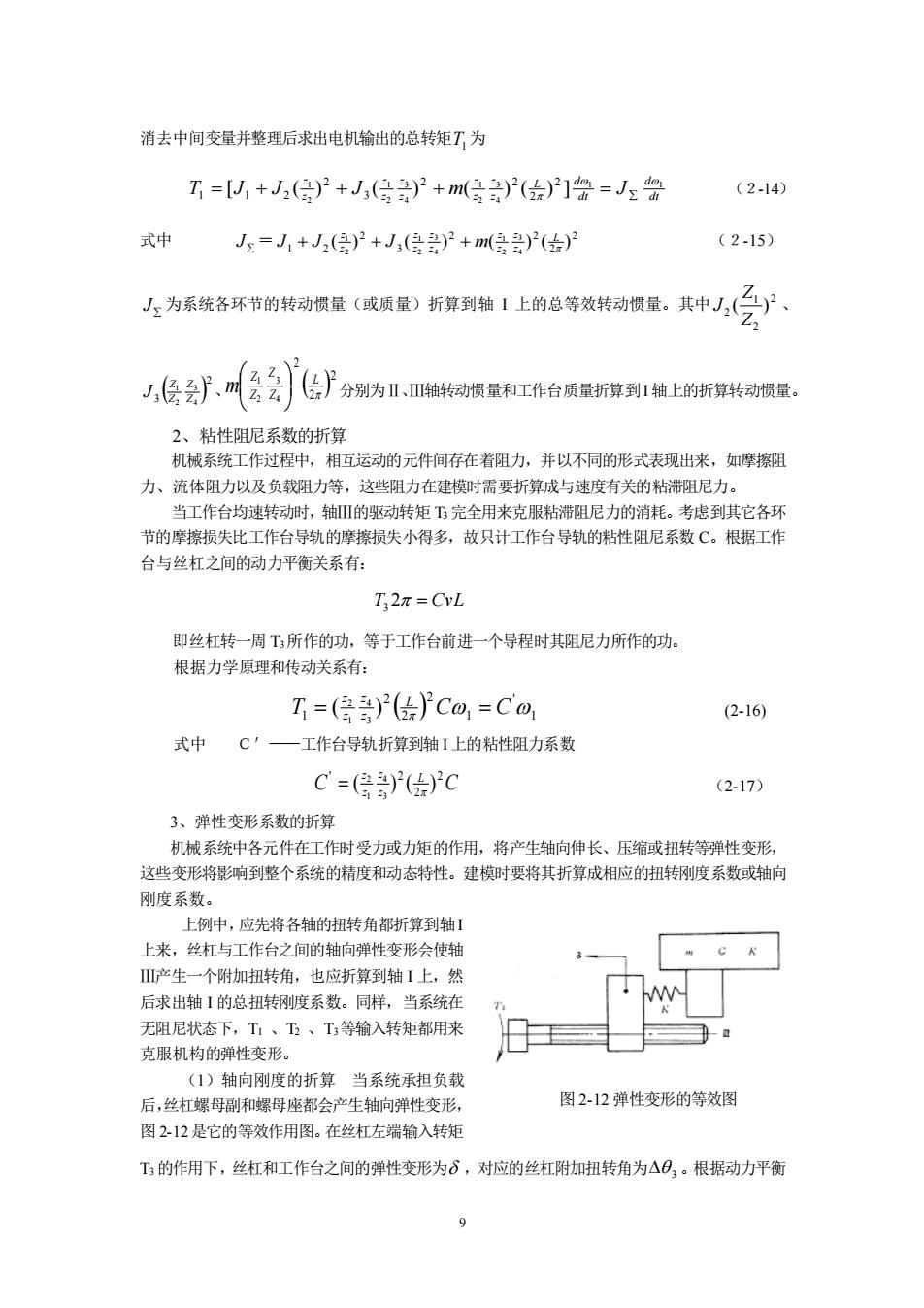
消去中间变量并整理后求出电机输出的总转矩T为 T=+J2()2+J(经)2+m()2()2]绘=J2会 (2-14) 式中 J上=J+J,(+J,(停)2+m倍)(会) (2-15) 上为系环节的转动惯量(成质量折算到1上的总等效动损量。其中,学 J,修引,分为,转动量和工作台质量折算到1鞋上的新转动损量。 2、粘性阻尼系数的折算 机械系统工作过程中,相互运动的元件间存在着阻力,并以不同的形式表现出来,如摩擦 力、流体阳力以及负载阻力等,这些阻力在建模时需要折算成与速度有关的粘滞阻尼力。 当工作台均速转动时,轴Ⅲ的驱动转矩T完全用来克服粘滞阻尼力的消耗。考虑到其它各环 节的摩擦损失比工作台导轨的摩擦损失小得多,故只计工作台导轨的粘性阻尼系数C。根据工作 台与丝杠之间的动力平衡关系有: T,2x=CvL 即丝杠转一周T所作的功,等于工作台前进一个导程时其阻尼力所作的功。 根据力学原理和传动关系有: T=(臣)2÷C0,=Co, (2-16) 式中C'一工作台导轨折算到轴1上的粘性阻力系数 C=停)P℃ (2-17) 3、弹性变形系数的折算 机械系统中各元件在工作时受力或力矩的作用,将产生轴向伸长、压缩或扭转等弹性变形 这些变形将影响到整个系统的桔度和动态特性。建模时要将其折算成相应的扭转刚度系数或轴向 刚度系数。 上中,应先将冬轴的转角都折算到轴 上来,丝杠与工作台之间的轴向弹性变形会使轴 产生一个附加扭转角,也应折算到轴1上,然 后求出轴1的总扭转度系数。同样,当系统在 无阻尼状态下,T、五、T等输入转矩都用来 -a 克服机构的弹性变形。 (1)轴向刚度的折算当系统承担负载 后,丝杠螺母副和螺母座都会产生轴向弹性变形 图212弹性变形的等效图 图212是它的等效作用图。在丝杠左端输入转矩 工的作用下,丝杠和工作台之间的弹性变形为6,对应的丝杠附加扭转角为△日,。根据动力平衡 99 消去中间变量并整理后求出电机输出的总转矩 T1 为 dt d dt L d z z z z z z z z z z T J J J m J 1 1 4 3 2 1 4 3 2 1 2 1 [ ( ) ( ) ( ) ( ) ] 2 2 2 2 3 2 1 1 2 = + + + = (2-14) 式中 J = 2 2 2 2 3 2 1 2 ( ) ( ) ( ) ( ) 4 3 2 1 4 3 2 1 2 1 L z z z z z z z z z z J + J + J + m (2-15) J 为系统各环节的转动惯量(或质量)折算到轴 I 上的总等效转动惯量。其中 2 2 1 2 ( ) Z Z J 、 ( ) 2 3 4 3 2 1 Z Z Z Z J 、 ( ) 2 2 2 4 3 2 1 L Z Z Z Z m 分别为Ⅱ、Ⅲ轴转动惯量和工作台质量折算到I 轴上的折算转动惯量。 2、粘性阻尼系数的折算 机械系统工作过程中,相互运动的元件间存在着阻力,并以不同的形式表现出来,如摩擦阻 力、流体阻力以及负载阻力等,这些阻力在建模时需要折算成与速度有关的粘滞阻尼力。 当工作台均速转动时,轴Ⅲ的驱动转矩 T3 完全用来克服粘滞阻尼力的消耗。考虑到其它各环 节的摩擦损失比工作台导轨的摩擦损失小得多,故只计工作台导轨的粘性阻尼系数 C。根据工作 台与丝杠之间的动力平衡关系有: T3 2 = CvL 即丝杠转一周 T3所作的功,等于工作台前进一个导程时其阻尼力所作的功。 根据力学原理和传动关系有: ( ) 1 ' 1 2 2 2 1 ( ) 3 4 1 T 2 z L C C z z z = = (2-16) 式中 C′——工作台导轨折算到轴 I 上的粘性阻力系数 C C L z z z z 2 2 ' 2 ( ) ( ) 3 4 1 2 = (2-17) 3、弹性变形系数的折算 机械系统中各元件在工作时受力或力矩的作用,将产生轴向伸长、压缩或扭转等弹性变形, 这些变形将影响到整个系统的精度和动态特性。建模时要将其折算成相应的扭转刚度系数或轴向 刚度系数。 上例中,应先将各轴的扭转角都折算到轴I 上来,丝杠与工作台之间的轴向弹性变形会使轴 Ⅲ产生一个附加扭转角,也应折算到轴 I 上,然 后求出轴 I 的总扭转刚度系数。同样,当系统在 无阻尼状态下,T1 、T2 、T3等输入转矩都用来 克服机构的弹性变形。 (1)轴向刚度的折算 当系统承担负载 后,丝杠螺母副和螺母座都会产生轴向弹性变形, 图 2-12是它的等效作用图。在丝杠左端输入转矩 T3 的作用下,丝杠和工作台之间的弹性变形为 ,对应的丝杠附加扭转角为 3 。根据动力平衡 图 2-12 弹性变形的等效图