正在加载图片...
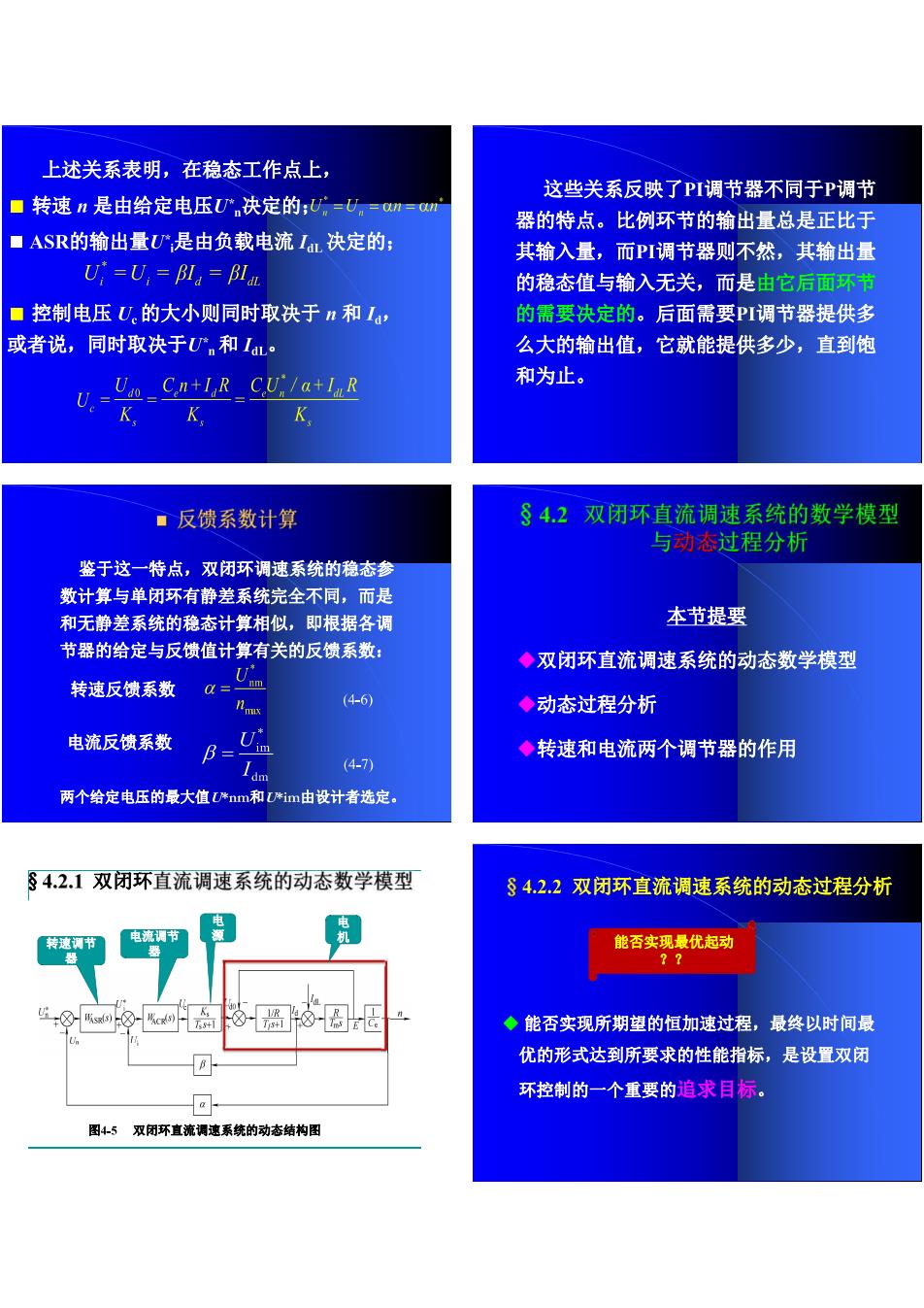
上述关系表明,在稳态工作点上, 转速n是由给定电压U决定的:==m 这些关系反映了PI调节器不同于P调节 器的特点。比例环节的输出量总是正比于 ASR的输出量U是由负载电流I决定的: 其输入量,而PI调节器则不然,其输出量 U:=U,BI,Bla 的稳态值与输入无关,而是由它后面环节 ■控制电压的大小则同时取决于m和 的需要决定的。后面需要PI调节器提供多 或者说,同时取决于”,和1a。 么大的输出值,它就能提供多少,直到饱 U-a-Cn*R.Cga出 和为止。 K K K ■反馈系数计算 §42双闭环直流调速系统的数学模型 与动态过程分析 鉴于这一特点,双闭环调速系统的稳态参 数计算与单闭环有静差系统完全不同,而是 和无静差系统的稳态计算相似,即根据各调 本节提要 节器的给定与反馈值计算有关的反馈系数 ◆双闭环直流调速系统的动态数学模型 转速反馈系数a= (46 ◆动态过程分析 电流反馈系数 B= U ◆转速和电流两个调节器的作用 (4-7) 两个给定电压的最大值Lnm和U*im由设计者选定, §4.2.1双闭环直流调速系统的动态数学模型 $4.2.2双闭环直流调速系统的动态过程分析 能香去动 ◆能否实现所期望的恒加速过程,最终以时间最 优的形式达到所要求的性能指标,是设置双闭 环控制的一个重要的追求目标。 田45和闭环直流调速系统的动态结构田