正在加载图片...
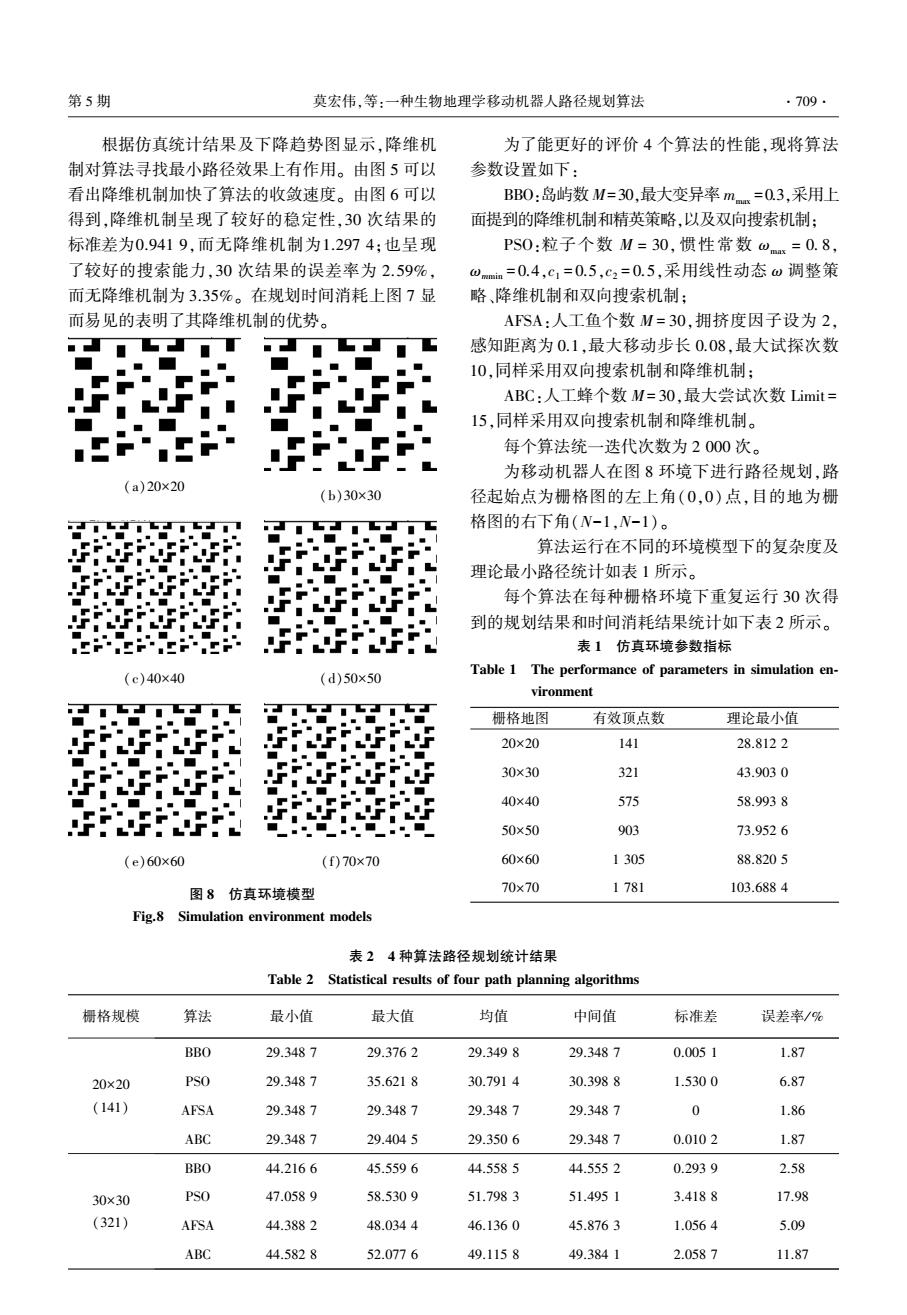
第5期 莫宏伟,等:一种生物地理学移动机器人路径规划算法 ·709. 根据仿真统计结果及下降趋势图显示,降维机 为了能更好的评价4个算法的性能,现将算法 制对算法寻找最小路径效果上有作用。由图5可以 参数设置如下: 看出降维机制加快了算法的收敛速度。由图6可以 BB0:岛屿数M=30,最大变异率mm=0.3,采用上 得到,降维机制呈现了较好的稳定性,30次结果的 面提到的降维机制和精英策略,以及双向搜索机制: 标准差为0.9419,而无降维机制为1.2974:也呈现 PS0:粒子个数M=30,惯性常数ωms=0.8, 了较好的搜索能力,30次结果的误差率为2.59%, min=0.4,C1=0.5,c2=0.5,采用线性动态w调整策 而无降维机制为3.35%。在规划时间消耗上图7显 略、降维机制和双向搜索机制; 而易见的表明了其降维机制的优势 AFSA:人工鱼个数M=30,拥挤度因子设为2, 感知距离为0.1,最大移动步长0.08,最大试探次数 ■ ■ 10,同样采用双向搜索机制和降维机制: ■ ■ ABC:人工蜂个数M=30,最大尝试次数Limit= 15,同样采用双向搜索机制和降维机制。 ■ 每个算法统一迭代次数为2000次。 为移动机器人在图8环境下进行路径规划,路 (a)20x20 (b)30×30 径起始点为栅格图的左上角(0,0)点,目的地为栅 格图的右下角(N-1,N-1)。 算法运行在不同的环境模型下的复杂度及 ◆ ” 理论最小路径统计如表1所示。 t ◆ ◆ 每个算法在每种栅格环境下重复运行30次得 到的规划结果和时间消耗结果统计如下表2所示。 ■ ■ 表1仿真环境参数指标 (c)40x40 Table 1 The performance of parameters in simulation en- (d)50x50 vironment 栅格地图 有效顶点数 理论最小值 20×20 141 28.8122 30×30 321 43.9030 40×40 575 58.9938 ■ 50x50 903 73.9526 (e)60x60 (f)70×70 60X60 1305 88.8205 图8仿真环境模型 70×70 1781 103.6884 Fig.8 Simulation environment models 表24种算法路径规划统计结果 Table 2 Statistical results of four path planning algorithms 栅格规模 算法 最小值 最大值 均值 中间值 标准差 误差率/% BBO 29.3487 29.3762 29.3498 29.3487 0.0051 1.87 20×20 PSO 29.3487 35.6218 30.7914 30.3988 1.5300 6.87 (141) AFSA 29.3487 29.3487 29.3487 29.3487 0 1.86 ABC 29.3487 29.4045 29.3506 29.3487 0.0102 1.87 BBO 44.2166 45.5596 44.5585 44.5552 0.2939 2.58 30×30 PSO 47.0589 58.5309 51.7983 51.4951 3.4188 17.98 (321) AFSA 44.3882 48.0344 46.1360 45.8763 1.0564 5.09 ABC 44.5828 52.0776 49.1158 49.3841 2.0587 11.87根据仿真统计结果及下降趋势图显示,降维机 制对算法寻找最小路径效果上有作用。 由图 5 可以 看出降维机制加快了算法的收敛速度。 由图 6 可以 得到,降维机制呈现了较好的稳定性,30 次结果的 标准差为0.941 9,而无降维机制为1.297 4;也呈现 了较好的搜索能力,30 次结果的误差率为 2.59%, 而无降维机制为 3.35%。 在规划时间消耗上图 7 显 而易见的表明了其降维机制的优势。 (a)20×20 (b)30×30 (c)40×40 (d)50×50 (e)60×60 (f)70×70 图 8 仿真环境模型 Fig.8 Simulation environment models 为了能更好的评价 4 个算法的性能,现将算法 参数设置如下: BBO:岛屿数 M=30,最大变异率 mmax =0.3,采用上 面提到的降维机制和精英策略,以及双向搜索机制; PSO:粒子个数 M = 30,惯性常数 ωmax = 0. 8, ωmmin = 0.4,c1 = 0.5,c2 = 0.5,采用线性动态 ω 调整策 略、降维机制和双向搜索机制; AFSA:人工鱼个数 M = 30,拥挤度因子设为 2, 感知距离为 0.1,最大移动步长 0.08,最大试探次数 10,同样采用双向搜索机制和降维机制; ABC:人工蜂个数 M= 30,最大尝试次数 Limit = 15,同样采用双向搜索机制和降维机制。 每个算法统一迭代次数为 2 000 次。 为移动机器人在图 8 环境下进行路径规划,路 径起始点为栅格图的左上角(0,0)点,目的地为栅 格图的右下角(N-1,N-1)。 算法运行在不同的环境模型下的复杂度及 理论最小路径统计如表 1 所示。 每个算法在每种栅格环境下重复运行 30 次得 到的规划结果和时间消耗结果统计如下表 2 所示。 表 1 仿真环境参数指标 Table 1 The performance of parameters in simulation en⁃ vironment 栅格地图 有效顶点数 理论最小值 20×20 141 28.812 2 30×30 321 43.903 0 40×40 575 58.993 8 50×50 903 73.952 6 60×60 1 305 88.820 5 70×70 1 781 103.688 4 表 2 4 种算法路径规划统计结果 Table 2 Statistical results of four path planning algorithms 栅格规模 算法 最小值 最大值 均值 中间值 标准差 误差率/ % 20×20 (141) BBO 29.348 7 29.376 2 29.349 8 29.348 7 0.005 1 1.87 PSO 29.348 7 35.621 8 30.791 4 30.398 8 1.530 0 6.87 AFSA 29.348 7 29.348 7 29.348 7 29.348 7 0 1.86 ABC 29.348 7 29.404 5 29.350 6 29.348 7 0.010 2 1.87 30×30 (321) BBO 44.216 6 45.559 6 44.558 5 44.555 2 0.293 9 2.58 PSO 47.058 9 58.530 9 51.798 3 51.495 1 3.418 8 17.98 AFSA 44.388 2 48.034 4 46.136 0 45.876 3 1.056 4 5.09 ABC 44.582 8 52.077 6 49.115 8 49.384 1 2.058 7 11.87 第 5 期 莫宏伟,等:一种生物地理学移动机器人路径规划算法 ·709·