正在加载图片...
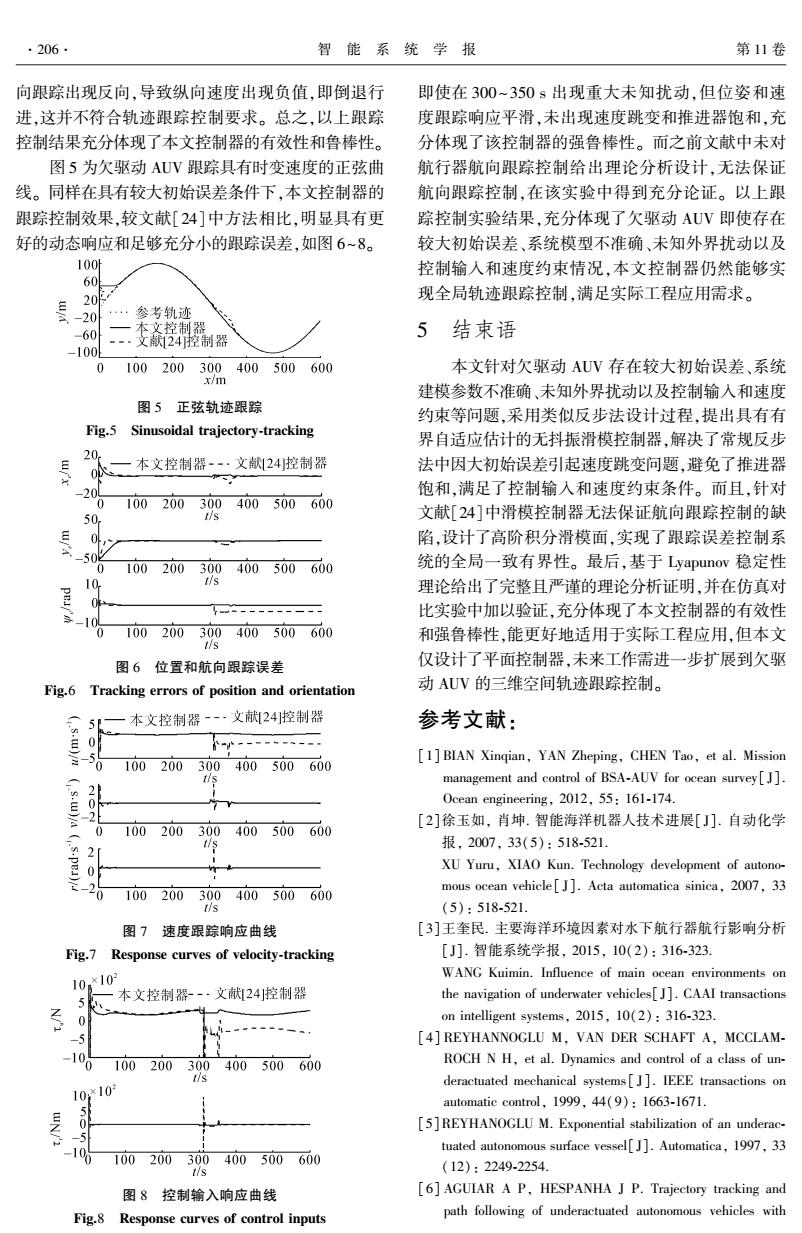
·206· 智能系统学报 第11卷 向跟踪出现反向,导致纵向速度出现负值,即倒退行 即使在300~350s出现重大未知扰动,但位姿和速 进,这并不符合轨迹跟踪控制要求。总之,以上跟踪 度跟踪响应平滑,未出现速度跳变和推进器饱和,充 控制结果充分体现了本文控制器的有效性和鲁棒性。 分体现了该控制器的强鲁棒性。而之前文献中未对 图5为欠驱动AUV跟踪具有时变速度的正弦曲 航行器航向跟踪控制给出理论分析设计,无法保证 线。同样在具有较大初始误差条件下,本文控制器的 航向跟踪控制,在该实验中得到充分论证。以上跟 跟踪控制效果,较文献[24]中方法相比,明显具有更 踪控制实验结果,充分体现了欠驱动AUV即使存在 好的动态响应和足够充分小的跟踪误差,如图6~8。 较大初始误差、系统模型不准确、未知外界扰动以及 100 控制输入和速度约束情况,本文控制器仍然能够实 60 20 现全局轨迹跟踪控制,满足实际工程应用需求。 -20 参考轨迹 -60 本这控制器 -…文献24控制器 5结束语 -100 0 100200 300400500600 本文针对欠驱动AUV存在较大初始误差、系统 x/m 建模参数不准确、未知外界扰动以及控制输入和速度 图5正弦轨迹跟踪 约束等问题,采用类似反步法设计过程,提出具有有 Fig.5 Sinusoidal trajectory-tracking 界自适应估计的无抖振滑模控制器,解决了常规反步 20 一本文控制器--·文献24控制器 法中因大初始误差引起速度跳变问题,避免了推进器 -20 饱和,满足了控制输入和速度约束条件。而且,针对 100200300400500600 50 t/s 文献[24]中滑模控制器无法保证航向跟踪控制的缺 陷,设计了高阶积分滑模面,实现了跟踪误差控制系 -50 0100200300400500600 统的全局一致有界性。最后,基于Lyapunov稳定性 10 t/s 理论给出了完整且严谨的理论分析证明,并在仿真对 -------- 比实验中加以验证,充分体现了本文控制器的有效性 10 100200300400500600 和强鲁棒性,能更好地适用于实际工程应用,但本文 图6位置和航向跟踪误差 仅设计了平面控制器,未来工作需进一步扩展到欠驱 Fig.6 Tracking errors of position and orientation 动AUV的三维空间轨迹跟踪控制。 一本文控制器--·文献24]控制器 参考文献: 0 -5 [1]BIAN Xingian,YAN Zheping,CHEN Tao,et al.Mission 0 100200300400500600 management and control of BSA-AUV for ocean survey[J]. 2 0 Y Ocean engineering,2012,55:161-174. [2]徐玉如,肖坤.智能海洋机器人技术进展[J].自动化学 0 100200300400500600 2 1/s 报,2007,33(5):518-521. 0 XU Yuru,XIAO Kun.Technology development of autono- mous ocean vehicle[J].Acta automatica sinica,2007,33 20 100200300400500600 (5):518-521 图7速度跟踪响应曲线 [3]王奎民.主要海洋环境因素对水下航行器航行影响分析 Fig.7 Response curves of velocity-tracking [J].智能系统学报,2015,10(2):316-323 10B×10 WANG Kuimin.Influence of main ocean environments on 本文控制器--·文献24]控制器 5k- the navigation of underwater vehicles[J].CAAI transactions 0 on intelligent systems,2015,10(2):316-323. [4]REYHANNOGLU M,VAN DER SCHAFT A,MCCLAM- 106 100200300400500600 ROCH N H,et al.Dynamics and control of a class of un- t/s deractuated mechanical systems[J].IEEE transactions on 10×10 automatic control,1999,44(9):1663-1671. [5]REYHANOGLU M.Exponential stabilization of an underac- -5 tuated autonomous surface vessel[].Automatica,1997,33 100200300400500600 t/s (12):2249-2254. 图8控制输入响应曲线 [6]AGUIAR A P,HESPANHA J P.Trajectory tracking and Fig.8 Response curves of control inputs path following of underactuated autonomous vehicles with向跟踪出现反向,导致纵向速度出现负值,即倒退行 进,这并不符合轨迹跟踪控制要求。 总之,以上跟踪 控制结果充分体现了本文控制器的有效性和鲁棒性。 图 5 为欠驱动 AUV 跟踪具有时变速度的正弦曲 线。 同样在具有较大初始误差条件下,本文控制器的 跟踪控制效果,较文献[24]中方法相比,明显具有更 好的动态响应和足够充分小的跟踪误差,如图 6~8。 图 5 正弦轨迹跟踪 Fig.5 Sinusoidal trajectory⁃tracking 图 6 位置和航向跟踪误差 Fig.6 Tracking errors of position and orientation 图 7 速度跟踪响应曲线 Fig.7 Response curves of velocity⁃tracking 图 8 控制输入响应曲线 Fig.8 Response curves of control inputs 即使在 300~350 s 出现重大未知扰动,但位姿和速 度跟踪响应平滑,未出现速度跳变和推进器饱和,充 分体现了该控制器的强鲁棒性。 而之前文献中未对 航行器航向跟踪控制给出理论分析设计,无法保证 航向跟踪控制,在该实验中得到充分论证。 以上跟 踪控制实验结果,充分体现了欠驱动 AUV 即使存在 较大初始误差、系统模型不准确、未知外界扰动以及 控制输入和速度约束情况,本文控制器仍然能够实 现全局轨迹跟踪控制,满足实际工程应用需求。 5 结束语 本文针对欠驱动 AUV 存在较大初始误差、系统 建模参数不准确、未知外界扰动以及控制输入和速度 约束等问题,采用类似反步法设计过程,提出具有有 界自适应估计的无抖振滑模控制器,解决了常规反步 法中因大初始误差引起速度跳变问题,避免了推进器 饱和,满足了控制输入和速度约束条件。 而且,针对 文献[24]中滑模控制器无法保证航向跟踪控制的缺 陷,设计了高阶积分滑模面,实现了跟踪误差控制系 统的全局一致有界性。 最后,基于 Lyapunov 稳定性 理论给出了完整且严谨的理论分析证明,并在仿真对 比实验中加以验证,充分体现了本文控制器的有效性 和强鲁棒性,能更好地适用于实际工程应用,但本文 仅设计了平面控制器,未来工作需进一步扩展到欠驱 动 AUV 的三维空间轨迹跟踪控制。 参考文献: [1] BIAN Xinqian, YAN Zheping, CHEN Tao, et al. Mission management and control of BSA⁃AUV for ocean survey[ J]. Ocean engineering, 2012, 55: 161⁃174. [2]徐玉如, 肖坤. 智能海洋机器人技术进展[ J]. 自动化学 报, 2007, 33(5): 518⁃521. XU Yuru, XIAO Kun. Technology development of autono⁃ mous ocean vehicle[ J]. Acta automatica sinica, 2007, 33 (5): 518⁃521. [3]王奎民. 主要海洋环境因素对水下航行器航行影响分析 [J]. 智能系统学报, 2015, 10(2): 316⁃323. WANG Kuimin. Influence of main ocean environments on the navigation of underwater vehicles[J]. CAAI transactions on intelligent systems, 2015, 10(2): 316⁃323. [4] REYHANNOGLU M, VAN DER SCHAFT A, MCCLAM⁃ ROCH N H, et al. Dynamics and control of a class of un⁃ deractuated mechanical systems [ J]. IEEE transactions on automatic control, 1999, 44(9): 1663⁃1671. [5]REYHANOGLU M. Exponential stabilization of an underac⁃ tuated autonomous surface vessel[J]. Automatica, 1997, 33 (12): 2249⁃2254. [6] AGUIAR A P, HESPANHA J P. Trajectory tracking and path following of underactuated autonomous vehicles with ·206· 智 能 系 统 学 报 第 11 卷