正在加载图片...
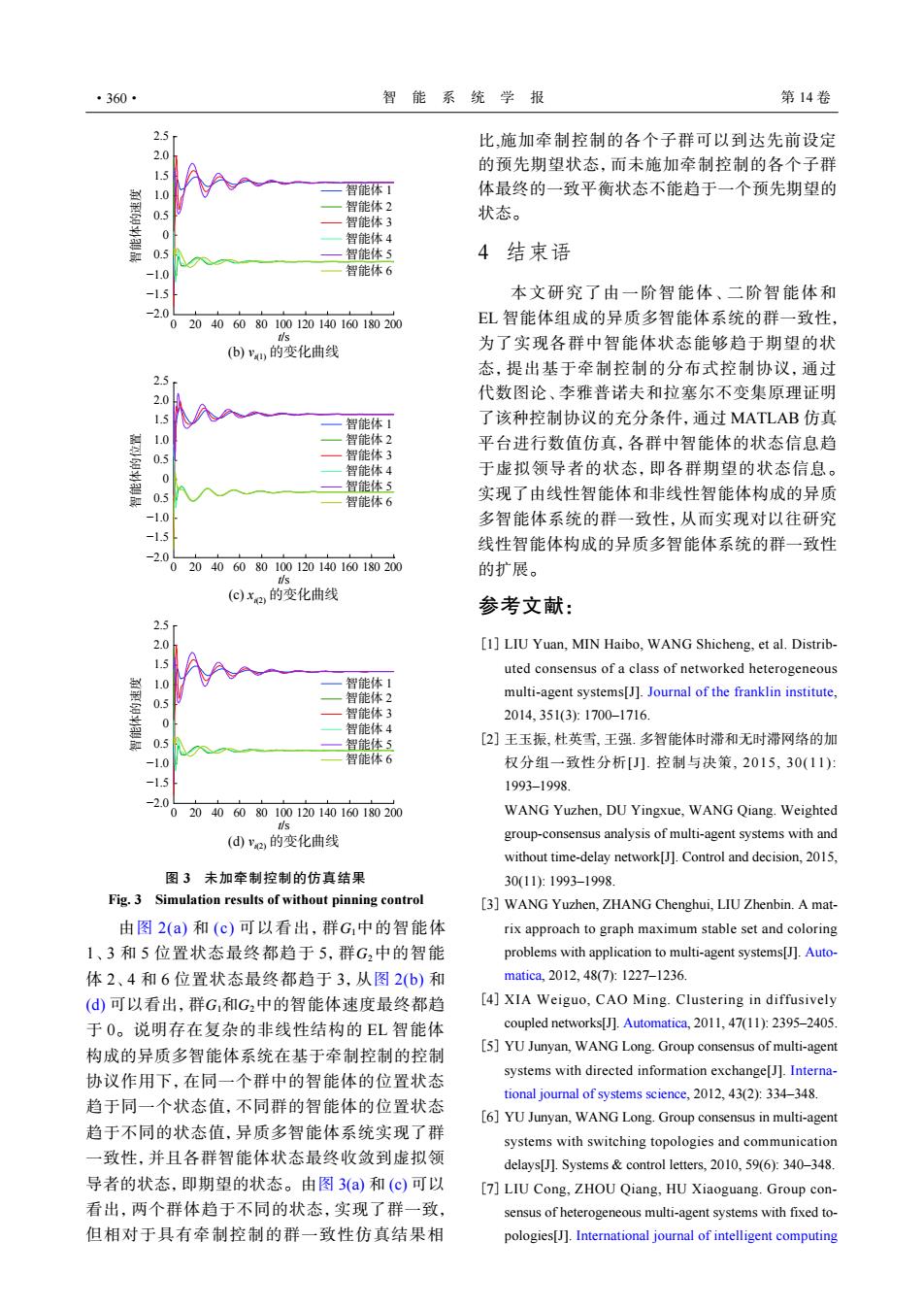
·360· 智能系统学报 第14卷 2.51 比,施加牵制控制的各个子群可以到达先前设定 2.0 的预先期望状态,而未施加牵制控制的各个子群 0 智能体1 体最终的一致平衡状态不能趋于一个预先期望的 0.5 智能体2 智能体3 状态。 智能体4 0.5 智能体5 4结束语 -1.0 智能体6 -1.5 本文研究了由一阶智能体、二阶智能体和 -2. 020406080100120140160180200 EL智能体组成的异质多智能体系统的群一致性, (b)如的变化曲线 为了实现各群中智能体状态能够趋于期望的状 态,提出基于牵制控制的分布式控制协议,通过 2.5 2.0 代数图论、李雅普诺夫和拉塞尔不变集原理证明 5 智能体1 了该种控制协议的充分条件,通过MATLAB仿真 0 智能体2 平台进行数值仿真,各群中智能体的状态信息趋 0.5 智能体3 智能体4 于虚拟领导者的状态,即各群期望的状态信息。 ·智能体5 0.5 智能体6 实现了由线性智能体和非线性智能体构成的异质 -1.0 多智能体系统的群一致性,从而实现对以往研究 -1.5 线性智能体构成的异质多智能体系统的群一致性 -2.0 020406080100120140160180200 的扩展。 tis (⊙)x和的变化曲线 参考文献: 2.5 [1]LIU Yuan,MIN Haibo,WANG Shicheng,et al.Distrib- 1 uted consensus of a class of networked heterogeneous .智能体1 智能体2 multi-agent systems[J].Journal of the franklin institute. 智能体3 2014.351(3:1700-1716. 智能体4 0.5 智能体5 [2]王玉振,杜英雪,王强.多智能体时滞和无时滞网络的加 -1.0 智能体6 权分组一致性分析[.控制与决策,2015,30(11): -1.5 1993-1998 -2.0 020406080100120140160180200 WANG Yuzhen,DU Yingxue,WANG Qiang.Weighted (dve的变化曲线 group-consensus analysis of multi-agent systems with and without time-delay network[J].Control and decision,2015. 图3未加牵制控制的仿真结果 30(11):1993-1998 Fig.3 Simulation results of without pinning control [3]WANG Yuzhen,ZHANG Chenghui,LIU Zhenbin.A mat- 由图2(a)和(c)可以看出,群G,中的智能体 rix approach to graph maximum stable set and coloring 1、3和5位置状态最终都趋于5,群G,中的智能 problems with application to multi-agent systems[J].Auto- 体2、4和6位置状态最终都趋于3,从图2(b)和 matica,2012,48(7):1227-1236 (d)可以看出,群G,和G2中的智能体速度最终都趋 [4]XIA Weiguo,CAO Ming.Clustering in diffusively 于0。说明存在复杂的非线性结构的EL智能体 coupled networks[J].Automatica,2011,47(11):2395-2405. 构成的异质多智能体系统在基于牵制控制的控制 [5]YU Junyan,WANG Long.Group consensus of multi-agent 协议作用下,在同一个群中的智能体的位置状态 systems with directed information exchange[J].Interna- tional journal of systems science,2012,43(2):334-348. 趋于同一个状态值,不同群的智能体的位置状态 [6]YU Junyan,WANG Long.Group consensus in multi-agent 趋于不同的状态值,异质多智能体系统实现了群 systems with switching topologies and communication 一致性,并且各群智能体状态最终收敛到虚拟领 delays[J].Systems control letters,2010,59(6):340-348 导者的状态,即期望的状态。由图3(a)和(c)可以 [7]LIU Cong,ZHOU Qiang,HU Xiaoguang.Group con- 看出,两个群体趋于不同的状态,实现了群一致, sensus of heterogeneous multi-agent systems with fixed to- 但相对于具有牵制控制的群一致性仿真结果相 pologies[J].International journal of intelligent computingG1 G2 G1 G2 由图 2(a) 和 (c) 可以看出,群 中的智能体 1、3 和 5 位置状态最终都趋于 5,群 中的智能 体 2、4 和 6 位置状态最终都趋于 3,从图 2(b) 和 (d) 可以看出,群 和 中的智能体速度最终都趋 于 0。说明存在复杂的非线性结构的 EL 智能体 构成的异质多智能体系统在基于牵制控制的控制 协议作用下,在同一个群中的智能体的位置状态 趋于同一个状态值,不同群的智能体的位置状态 趋于不同的状态值,异质多智能体系统实现了群 一致性,并且各群智能体状态最终收敛到虚拟领 导者的状态,即期望的状态。由图 3(a) 和 (c) 可以 看出,两个群体趋于不同的状态,实现了群一致, 但相对于具有牵制控制的群一致性仿真结果相 比,施加牵制控制的各个子群可以到达先前设定 的预先期望状态,而未施加牵制控制的各个子群 体最终的一致平衡状态不能趋于一个预先期望的 状态。 4 结束语 本文研究了由一阶智能体、二阶智能体和 EL 智能体组成的异质多智能体系统的群一致性, 为了实现各群中智能体状态能够趋于期望的状 态,提出基于牵制控制的分布式控制协议,通过 代数图论、李雅普诺夫和拉塞尔不变集原理证明 了该种控制协议的充分条件,通过 MATLAB 仿真 平台进行数值仿真,各群中智能体的状态信息趋 于虚拟领导者的状态,即各群期望的状态信息。 实现了由线性智能体和非线性智能体构成的异质 多智能体系统的群一致性,从而实现对以往研究 线性智能体构成的异质多智能体系统的群一致性 的扩展。 参考文献: LIU Yuan, MIN Haibo, WANG Shicheng, et al. Distributed consensus of a class of networked heterogeneous multi-agent systems[J]. Journal of the franklin institute, 2014, 351(3): 1700–1716. [1] 王玉振, 杜英雪, 王强. 多智能体时滞和无时滞网络的加 权分组一致性分析[J]. 控制与决策, 2015, 30(11): 1993–1998. WANG Yuzhen, DU Yingxue, WANG Qiang. Weighted group-consensus analysis of multi-agent systems with and without time-delay network[J]. Control and decision, 2015, 30(11): 1993–1998. [2] WANG Yuzhen, ZHANG Chenghui, LIU Zhenbin. A matrix approach to graph maximum stable set and coloring problems with application to multi-agent systems[J]. Automatica, 2012, 48(7): 1227–1236. [3] XIA Weiguo, CAO Ming. Clustering in diffusively coupled networks[J]. Automatica, 2011, 47(11): 2395–2405. [4] YU Junyan, WANG Long. Group consensus of multi-agent systems with directed information exchange[J]. International journal of systems science, 2012, 43(2): 334–348. [5] YU Junyan, WANG Long. Group consensus in multi-agent systems with switching topologies and communication delays[J]. Systems & control letters, 2010, 59(6): 340–348. [6] LIU Cong, ZHOU Qiang, HU Xiaoguang. Group consensus of heterogeneous multi-agent systems with fixed topologies[J]. International journal of intelligent computing [7] 0 20 40 60 80 100 120 140 160 180 200 t/s 智能体 1 智能体 2 智能体 3 智能体 4 智能体 5 智能体 6 (b) vi(1) 的变化曲线 0 20 40 60 80 100 120 140 160 180 200 t/s (c) xi(2) 的变化曲线 0 20 40 60 80 100 120 140 160 180 200 t/s (d) vi(2) 的变化曲线 −2.0 −1.5 −1.0 0.5 0 0.5 1.0 1.5 2.0 2.5 −2.0 −1.5 −1.0 0.5 0 0.5 1.0 1.5 2.0 2.5 −2.0 −1.5 −1.0 0.5 0 0.5 1.0 1.5 2.0 2.5 智能体的速度 智能体的位置 智能体 1 智能体 2 智能体 3 智能体 4 智能体 5 智能体 6 智能体 1 智能体 2 智能体 3 智能体 4 智能体 5 智能体 6 智能体的速度 图 3 未加牵制控制的仿真结果 Fig. 3 Simulation results of without pinning control ·360· 智 能 系 统 学 报 第 14 卷