正在加载图片...
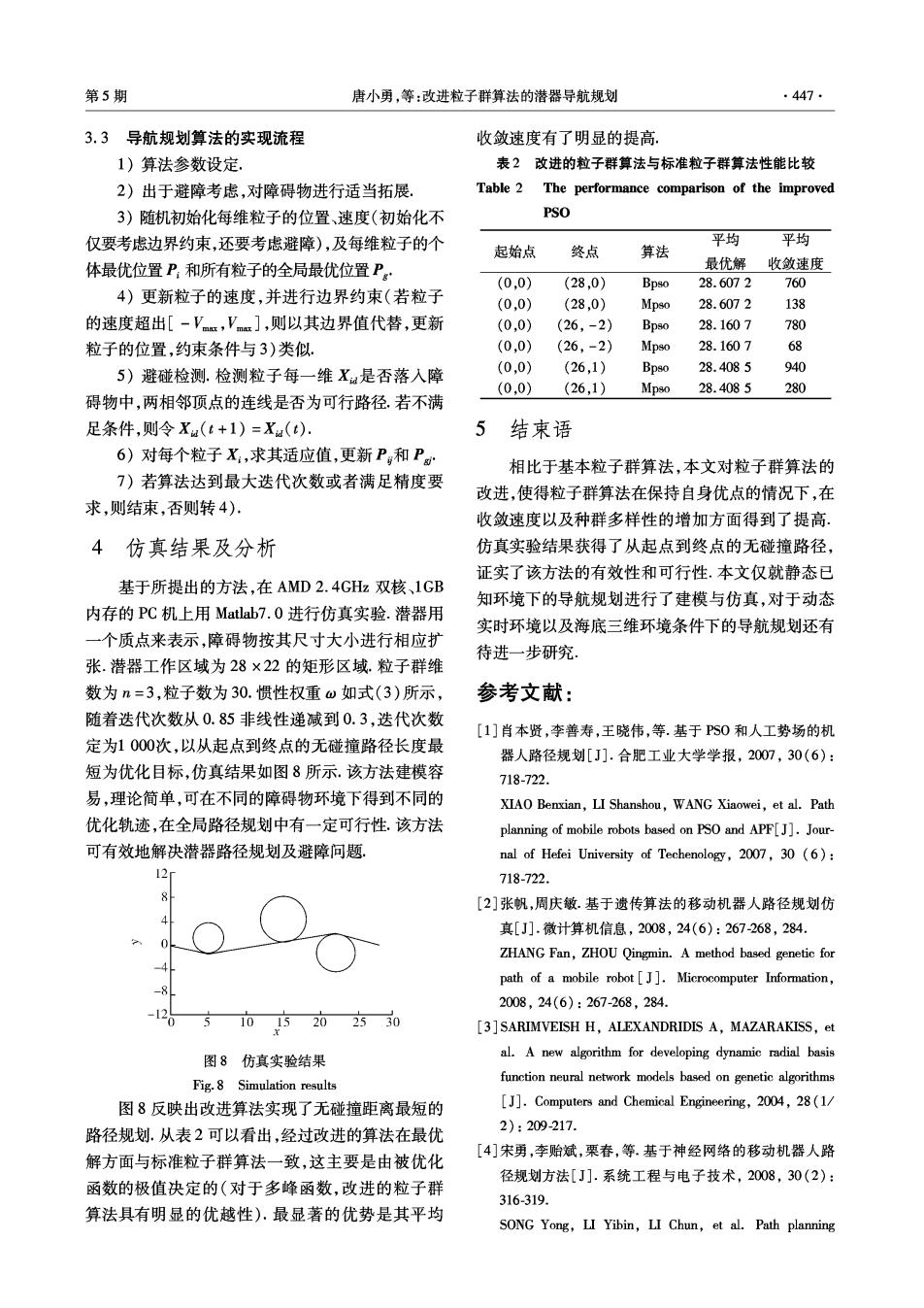
第5期 唐小勇,等:改进粒子群算法的潜器导航规划 ·447 3.3导航规划算法的实现流程 收敛速度有了明显的提高, 1)算法参数设定. 表2改进的粒子群算法与标准粒子群算法性能比较 2)出于避障考虑,对障碍物进行适当拓展, Table 2 The performance comparison of the improved 3)随机初始化每维粒子的位置、速度(初始化不 PSO 仅要考虑边界约束,还要考虑避障),及每维粒子的个 平均 平均 起始点 终点 算法 体最优位置P:和所有粒子的全局最优位置P 最优解收敛速度 (0.0) (28,0) Bpso 28.6072 760 4)更新粒子的速度,并进行边界约束(若粒子 (0,0) (28,0) Mpso 28.6072 138 的速度超出[-V,Vm],则以其边界值代替,更新 (0,0) (26,-2) Bpso 28.1607 780 粒子的位置,约束条件与3)类似 (0,0) (26,-2) Mpso 28.1607 68 (0,0) (26,1) Bpso 28.4085 940 5)避碰检测.检测粒子每一维Xa是否落入障 (0,0) (26,1) Mpso 28.4085 280 碍物中,两相邻顶点的连线是否为可行路径.若不满 足条件,则令Xa(t+1)=Xa(t). 5 结束语 6)对每个粒子X,求其适应值,更新Pg和P 相比于基本粒子群算法,本文对粒子群算法的 7)若算法达到最大迭代次数或者满足精度要 改进,使得粒子群算法在保持自身优点的情况下,在 求,则结束,否则转4) 收敛速度以及种群多样性的增加方面得到了提高. 4仿真结果及分析 仿真实验结果获得了从起点到终点的无碰撞路径, 证实了该方法的有效性和可行性.本文仅就静态已 基于所提出的方法,在AMD2.4GHz双核、1GB 知环境下的导航规划进行了建模与仿真,对于动态 内存的PC机上用Matlab7.0进行仿真实验.潜器用 实时环境以及海底三维环境条件下的导航规划还有 一个质点来表示,障碍物按其尺寸大小进行相应扩 待进一步研究。 张.潜器工作区域为28×22的矩形区域.粒子群维 数为n=3,粒子数为30.惯性权重o如式(3)所示, 参考文献: 随着迭代次数从0.85非线性递减到0.3,迭代次数 [1]肖本贤,李善寿,王晓伟,等.基于PS0和人工势场的机 定为1000次,以从起点到终点的无碰撞路径长度最 器人路径规划[J].合肥工业大学学报,2007,30(6): 短为优化目标,仿真结果如图8所示.该方法建模容 718-722. 易,理论简单,可在不同的障碍物环境下得到不同的 XIAO Benxian,LI Shanshou,WANG Xiaowei,et al.Path 优化轨迹,在全局路径规划中有一定可行性.该方法 planning of mobile robots based on PSO and APF[J].Jour- 可有效地解决潜器路径规划及避障问题, nal of Hefei University of Techenology,2007,30(6): 718-722. [2]张帆,周庆敏.基于遗传算法的移动机器人路径规划仿 真[J].微计算机信息,2008,24(6):267-268,284. ZHANG Fan,ZHOU Qingmin.A method based genetic for path of a mobile robot [J].Microcomputer Information, 2008,24(6):267-268,284 1015202530 [3]SARIMVEISH H,ALEXANDRIDIS A,MAZARAKISS,et 图8仿真实验结果 al.A new algorithm for developing dynamic radial basis Fig.8 Simulation results function neural network models based on genetic algorithms 图8反映出改进算法实现了无碰撞距离最短的 [J].Computers and Chemical Engineering,2004,28(1/ 路径规划.从表2可以看出,经过改进的算法在最优 2):209-217. [4]宋勇,李贻斌,栗春,等.基于神经网络的移动机器人路 解方面与标准粒子群算法一致,这主要是由被优化 径规划方法[J].系统工程与电子技术,2008,30(2): 函数的极值决定的(对于多峰函数,改进的粒子群 316-319. 算法具有明显的优越性).最显著的优势是其平均 SONG Yong,LI Yibin,LI Chun,et al.Path planning